エンジニアリング– category –
ソフトウェア・ハードウェアエンジニアリングに関する技術メモ。実務で役立つ技術情報をまとめています。
-

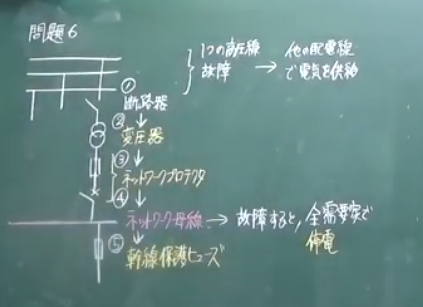
【動画 電験合格】電験三種 電力演習編 電力6 配電(3) スポットネットワーク方式 三相3線式1回線専用配電線路の計算
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力6 問題と解答 ... -
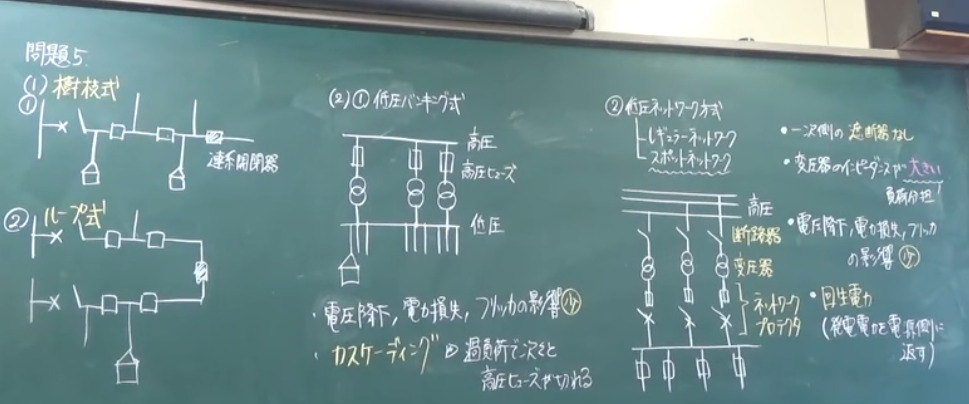
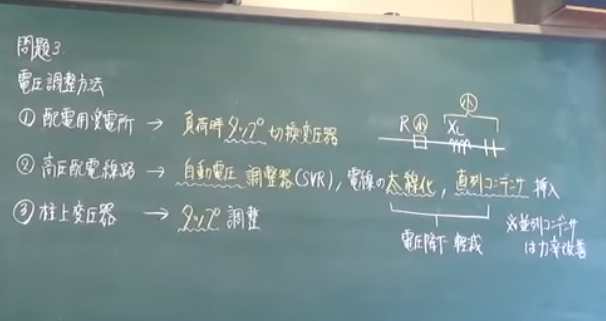
【動画 電験合格】電験三種 電力演習編 電力6 配電(2)配電線路の電圧調整や保護について 配電線路の形状
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力6 問題と解答 ... -
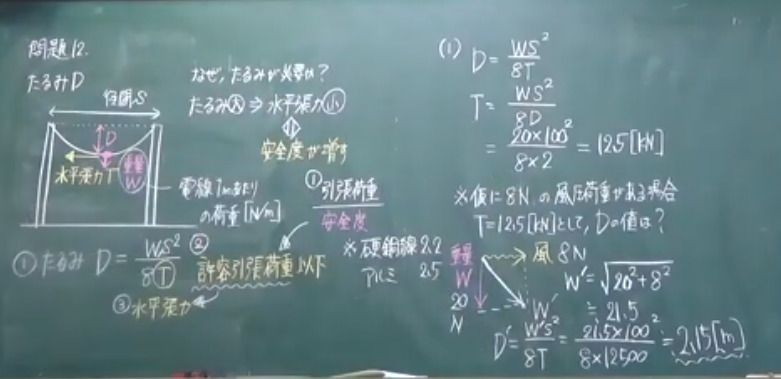
【動画 電験合格】電験三種 電力演習編 電力6 配電(1) 電線の太さの決定要素 架空配電線路の要素
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力6 問題と解答 ... -
【動画 電験合格】電験三種 電力演習編 電力5 送電(5) 架空電線路において,導体の温度が30℃のとき,たるみが2mであった。
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力5 問題と解答 ... -
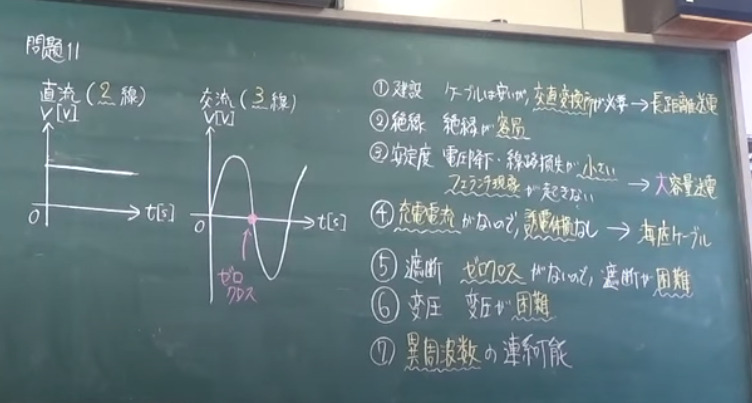
【動画 電験合格】電験三種 電力演習編 電力5 送電(4)フェランチ現象の抑制対策 直流送電の特徴
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力5 問題と解答 ... -
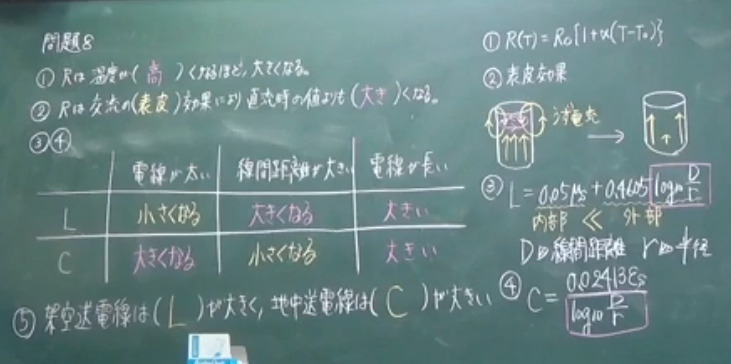
【動画 電験合格】電験三種 電力演習編 電力5 送電(3) 線路定数(R,L,C,G) 静電誘導・電磁誘導の防止策
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力5 問題と解答 ... -
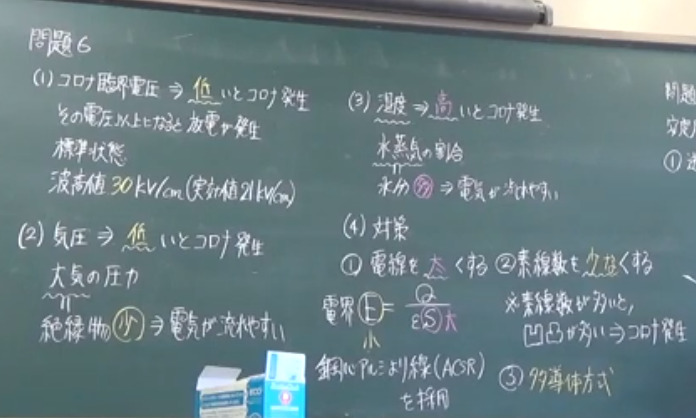
【動画 電験合格】電験三種 電力演習編 電力5 送電(2) 送電線の振動の対策 コロナ放電の対策 送電線系統の安定度を向上
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力5 問題と解答 ... -
【動画 電験合格】電験三種 電力演習編 電力5 送電(1) 送電線路の電線 構成機材 架空地線 がいしの塩害対策
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力5 問題と解答 ... -
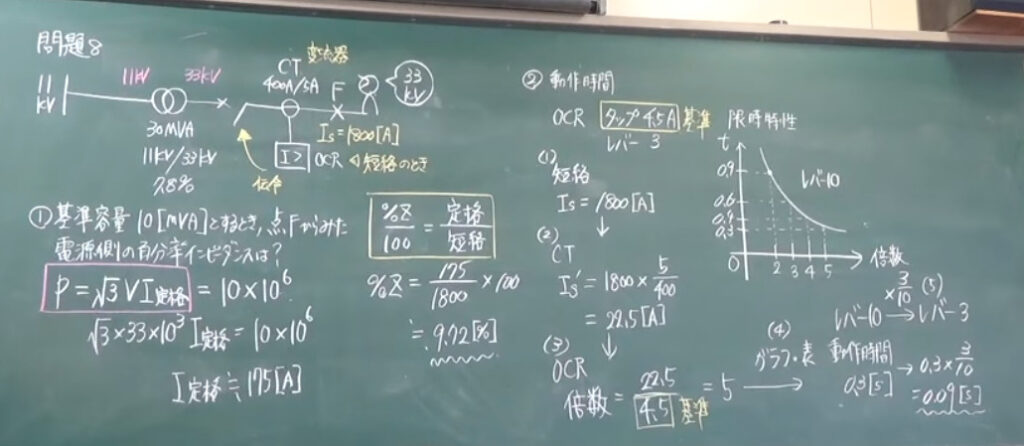
【動画 電験合格】電験三種 電力演習編 電力4 変電(3)変圧器の並行運転 三相短絡事故
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力4 問題と解答 ... -
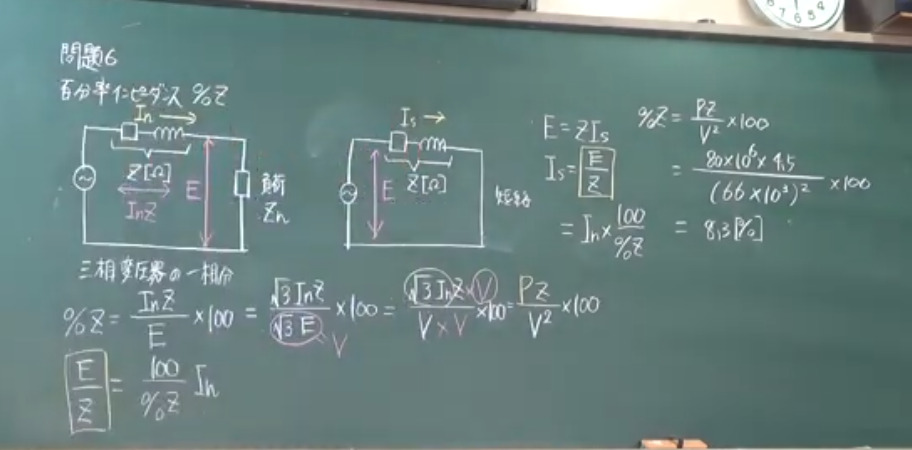
【動画 電験合格】電験三種 電力演習編 電力4 変電(2) リアクトルについて 百分率リアクタンスの値
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力4 問題と解答 ... -
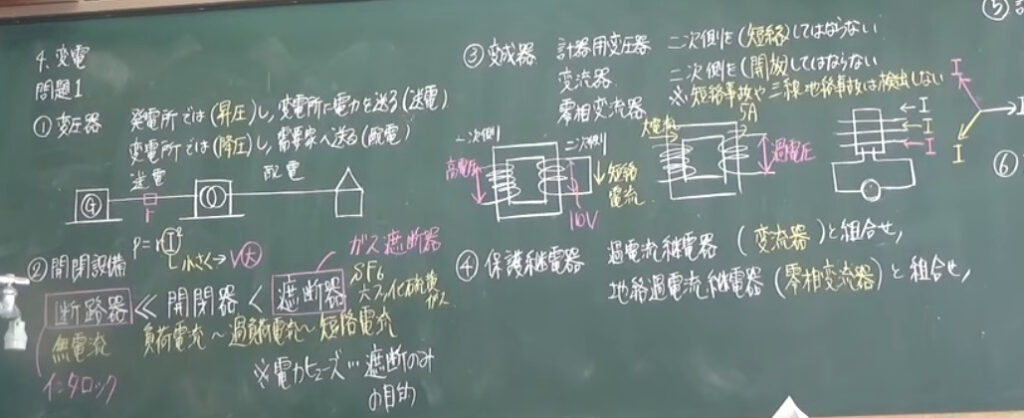
【動画 電験合格】電験三種 電力演習編 電力4 変電(1) 変電所の設備 接地方式
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力4 問題と解答 ... -
【動画 電験合格】電験三種 電力演習編 原子力発電・その他の発電(2)コンバインドサイクル 再エネ発電
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力3 問題と解答 ... -
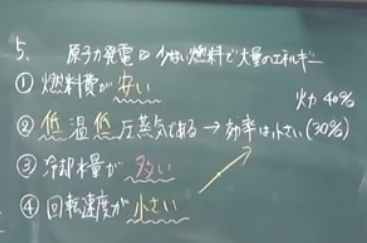
【動画 電験合格】電験三種 電力演習編 原子力発電・その他の発電(1) 原子力発電の原理
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力3 問題と解答 ... -
【動画 電験合格】電験三種 電力演習編 火力発電(3) 汽力発電設備の種々の効率 冷却水温
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力2 問題と解答 ... -
GPT電験電力についての疑問に答えてもらう
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 臨界点 臨界圧力 臨界温度とは 臨界点(Critical point)は、物質が液体と気体の相転移の境界... -
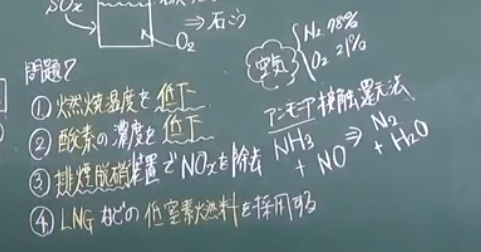
【動画 電験合格】電験三種 電力演習編 火力発電(2)熱効率の向上対策 窒素酸化物、硫黄酸化物の防止対策
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力2 問題と解答 ... -
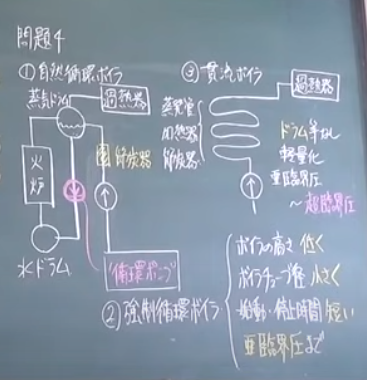
【動画 電験合格】電験三種 電力演習編 火力発電(1) 汽力発電の構造と基本的な熱サイクル
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力2 問題と解答 ... -
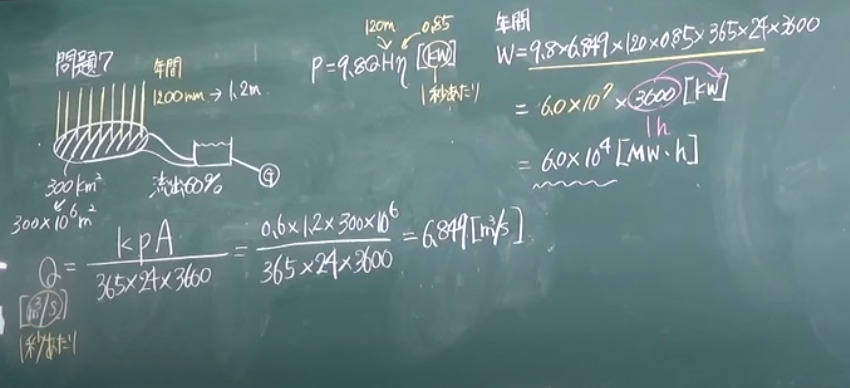
【動画 電験合格】電験三種 電力演習編 水力発電(3) 揚水発電所の発電量 効率
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力3 問題と解答 ... -
【動画 電験合格】電験三種 電力演習編 水力発電(2) 水車の設備の名称 キャビテーションの対策 水力発電所の発電量
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 演習電力2 問題と解答 ... -
【動画 電験合格】電験三種 電力演習編 水力発電(1) 水力発電の設備 有効落差との関係
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 【問題】(pdfファイル) ダウンロードして使用してください。 電験三種 電力演習1 問題と解答 問...