 [解答]③
参考
回転軸まわりの慣性モーメントと固有角振動数(H26)
回転軸周りの1自由度系の運動方程式(H25)
答え:③ (\displaystyle \omega=\sqrt{\frac{k}{J}})
[解答]③
参考
回転軸まわりの慣性モーメントと固有角振動数(H26)
回転軸周りの1自由度系の運動方程式(H25)
答え:③ (\displaystyle \omega=\sqrt{\frac{k}{J}})
理由(最短ルート)
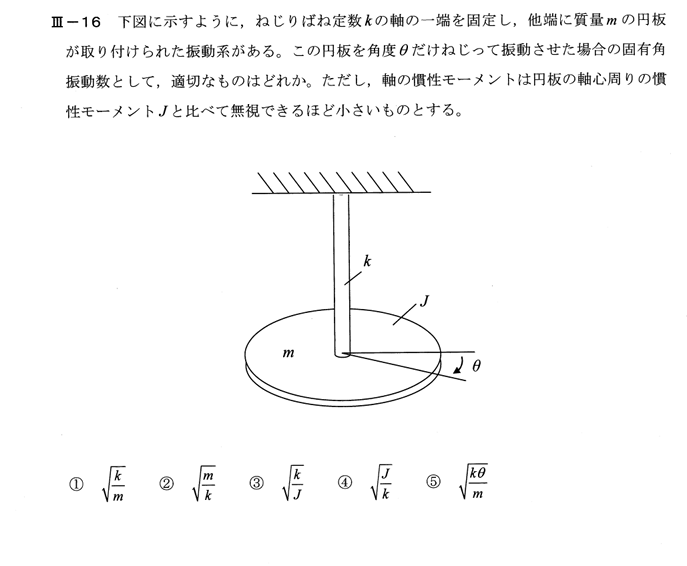
- ねじりばね:軸ねじれ角 (\theta) に比例して復元トルク [ \tau = -k,\theta \qquad[k:\ \mathrm{N,m/rad}] ]
- 運動方程式(回転のニュートンの式) [ J,\ddot{\theta}=\sum\tau = -k,\theta \quad\Rightarrow\quad J,\ddot{\theta}+k,\theta=0 ] (軸自身の慣性は無視 ⇒ 慣性モーメントは円板の (J) のみ)
- したがって固有角振動数 [ \boxed{\omega=\sqrt{\frac{k}{J}}} ]
エネルギー法でも同じ
[ T=\frac12 J\dot{\theta}^2,\quad U=\frac12 k\theta^2 ] → (J\ddot{\theta}+k\theta=0) → (\omega=\sqrt{k/J})。 ※円板半径を (R) とすると (J=\tfrac12 mR^2)(参考)。詳しく教えて下さい
いいですね。図の装置は**ねじりばね + 慣性体(円板)**の“1自由度ねじり振動”です。式づくりを最初から丁寧に追います。1) 物理モデルと記号
- (\theta(t)):円板のねじれ角(微小角、[rad])
- (k):ねじりばね定数(トルク/角度) ([,\mathrm{N,m/rad},])
- (J):円板の回転慣性モーメント(軸まわり) ([,\mathrm{kg,m^2},]) ※軸の慣性は「無視できるほど小さい」とあるので採用しない。
2) 復元トルク(フックの法則のねじり版)
ねじれ角 (\theta) に比例してばねの復元トルクが働く: [ \tau_{\text{spring}} = -,k,\theta ] 符号マイナスは、変位と逆向き(元に戻そうとする)という意味。3) 運動方程式(回転の運動方程式)
回転版ニュートンの第2法則: [ \sum \tau = J,\ddot{\theta} ] ここではばねトルクだけなので [ J,\ddot{\theta} = -k,\theta \quad\Rightarrow\quad \boxed{,J,\ddot{\theta}+k,\theta=0,} ] これは**1自由度の単振動(ねじり版)**の標準形です。4) 固有角振動数
標準形 (M\ddot q + K q=0) の解は (\omega=\sqrt{K/M})。 ここでは (M\to J), (K\to k) なので [ \boxed{,\omega=\sqrt{\frac{k}{J}},} ] (選択肢③)5) 単位チェック
[ \frac{k}{J};:;\frac{\mathrm{N,m/rad}}{\mathrm{kg,m^2}} = \frac{\mathrm{kg,m^2/s^2}}{\mathrm{kg,m^2}} = \frac{1}{\mathrm{s^2}} \Rightarrow \omega=\sqrt{k/J};[\mathrm{rad/s}] ] OK。6) 解の形と意味
微分方程式の一般解: [ \theta(t)=\Theta\cos(\omega t-\phi),\quad \omega=\sqrt{k/J} ] 周期 (T=2\pi/\omega) で減衰なしの等振幅ねじり振動(理想化)。7) エネルギー法(別解)
- 運動エネルギー:(\displaystyle T=\frac12 J\dot{\theta}^2)
- ばねのひずみエネルギー:(\displaystyle U=\frac12 k\theta^2)
8) 参考:円板の慣性モーメント
半径 (R)、質量 (m) の一様円板の軸まわり慣性モーメントは [ \boxed{,J=\frac12,mR^2,} ] (図の“軸心周り”) これを入れると (\omega=\sqrt{\dfrac{2k}{mR^2}})。9) 直感チェック
- ばねが硬い((k\uparrow))→ 速く振動((\omega\uparrow))
- 円板が重い/大きい((J\uparrow))→ 鈍重((\omega\downarrow))
- 線形近似は微小角((|\theta|\ll1))が前提
必要なら、数値例や**減衰(ねじり粘性 (c_\theta))**を入れた場合の (\lambda=-\frac{c_\theta}{2J}\pm i\sqrt{\frac{k}{J}-\left(\frac{c_\theta}{2J}\right)^2}) まで展開します。
回転と並進運動の式を比較すると、Jはmと対応しますか
はい、その理解で完璧です。✅ 結論
回転運動における慣性モーメント (J) は、並進運動における質量 (m) に対応します。 より正確に言うと、- 並進運動(直線運動)の「動きにくさ」=質量 (m)
- 回転運動(角運動)の「回りにくさ」=慣性モーメント (J)
✅ 対応表(これが本質)
| 並進運動 | 回転運動 |
|---|---|
| 変位 (x) | 角変位 (\theta) |
| 速度 (\dot{x}) | 角速度 (\dot{\theta}) |
| 加速度 (\ddot{x}) | 角加速度 (\ddot{\theta}) |
| 質量 (m) | 慣性モーメント (J) |
| 力 (F) | トルク(モーメント) (\tau) |
| 運動方程式:(m\ddot{x}=F) | 運動方程式:(J\ddot{\theta}=\tau) |
| ばね:(k x) | ねじりばね:(k\theta) |
| 固有角振動数:(\sqrt{k/m}) | 固有角振動数:(\sqrt{k/J}) |
✅ 直感的イメージ
質量 (m) が大きいほど動きにくいように、 慣性モーメント (J) が大きいほど回りにくい。 たとえば…- 同じ 1 kg でも → 半径 10 cm の円板より → 半径 1 m の大きな円板の方が回しづらい
✅ エネルギーの式でも完全に対応
並進の運動エネルギー [ T=\frac12 m\dot{x}^2 ] 回転の運動エネルギー [ T=\frac12 J\dot{\theta}^2 ] どちらも「慣性項 ×(速度)²/2」で同じ形。✅ ばね系の固有振動数も完全対応
並進系: [ m\ddot{x}+kx=0 \quad\Rightarrow\quad \omega=\sqrt{\frac{k}{m}} ] 回転系: [ J\ddot{\theta}+k\theta=0 \quad\Rightarrow\quad \omega=\sqrt{\frac{k}{J}} ]✅ まとめ
- **(\theta \leftrightarrow x)(変位の対応)
- (J \leftrightarrow m)(慣性の対応)
- (k \leftrightarrow k)(ばね定数)
- (\tau \leftrightarrow F)(駆動力の対応)**
必要なら、 ✅ 質点だけでなく棒・円板・球などの J の導出 ✅ 並進と回転が混ざる複合振動の例(倒立振子など) も解説できます!
回転による運動方程式はどのように導出されたのですか?
回転の運動方程式 [ J\ddot{\theta}=\sum \tau ] (角運動量の時間微分=外力モーメント) これは 並進運動の式 (m\ddot{x}=F) の「角度版」です。 でも、なぜこの形になるのか? ここをゼロから導出してみます。✅ 1. 最も基本に戻る:質点の運動方程式から導く
回転軸から距離 (r) の所にある質点 (m) を考える。 質点は円運動していて、角度 (\theta(t)) に応じて位置は [ x=r\theta ] と書ける(小角度だけでなく一般でも成立)。 並進の運動方程式は [ m\ddot{x}=F_{\text{tangential}} ] ここで [ x=r\theta \Rightarrow \ddot{x}=r\ddot{\theta} ] 代入すると [ m(r\ddot{\theta}) = F_{\text{tan}} ] 接線方向の力のモーメントは [ \tau = r F_{\text{tan}} ] 両辺に (r) を掛けると [ mr^2 \ddot{\theta} = r F_{\text{tan}} = \tau ] つまり [ \boxed{mr^2 \ddot{\theta} = \tau} ] ここで [ mr^2 \equiv J ] これは軸まわりの慣性モーメントの定義。 すると [ \boxed{J\ddot{\theta}=\tau} ] これが回転の運動方程式そのもの。✅ 2. 質点がたくさんある一般物体へ拡張
剛体は質点の集まりだから、 各質点に対して [ m_i r_i^2 \ddot{\theta}=\tau_i ] が成り立つ。 全部足せば [ \sum m_i r_i^2 \ddot{\theta} = \sum \tau_i ] 左辺: [ \left(\sum m_i r_i^2\right)\ddot{\theta} ] これは物体の慣性モーメント [ J=\sum m_i r_i^2 ] なので [ \boxed{J\ddot{\theta}=\sum \tau} ] こうして一般の剛体にも拡張される。✅ 3. もっと根本(角運動量)からの導出
剛体の角運動量 (L) は [ L = J\dot{\theta} ] ニュートンの運動方程式の回転版は [ \sum \tau = \frac{dL}{dt} ] なので [ \sum \tau = \frac{d}{dt}(J\dot{\theta}) ] もし J が一定(剛体)なら [ \sum \tau = J\ddot{\theta} ]✅ 4. エネルギー原理からの導出(ラグランジュ方程式)
運動エネルギー [ T=\frac12 J\dot{\theta}^2 ] ポテンシャル(ばねや重力など)を (U(\theta)) とすると [ \frac{d}{dt}\left(\frac{\partial T}{\partial \dot{\theta}}\right) +\frac{\partial U}{\partial \theta}=0 ] [ \frac{d}{dt}(J\dot{\theta})+k\theta=0 ] J が一定なら [ J\ddot{\theta}+k\theta=0 ] これも同じ式。✅ 5. 並進運動との比較で全体像をつかむ
| 並進運動 | 回転運動 |
|---|---|
| 質量 (m) | 慣性モーメント (J) |
| 変位 (x) | 回転角 (\theta) |
| 加速度 (\ddot x) | 角加速度 (\ddot\theta) |
| 力 (F) | トルク (\tau) |
| エネルギー (\frac12 m\dot{x}^2) | エネルギー (\frac12 J\dot{\theta}^2) |
| 法則 (m\ddot{x}=F) | 法則 (J\ddot{\theta}=\tau) |
✅ 6. 最後に一言でまとめると
回転の運動方程式は、質点に対する (m\ddot{x}=F) を 「角度で書き直しただけ」から生まれた。- (x=r\theta)
- (\ddot{x}=r\ddot{\theta})
- (\tau=rF)
- (mr^2=J)
必要なら、 ✅ 慣性モーメント (J=\int r^2 dm) の背景 ✅ 剛体の角運動量の空間ベクトル版 ✅ 並進+回転が混ざる例(倒立振子、ロボットアーム) も詳しく説明できます!
ここで mr^2 \equiv J これは軸まわりの慣性モーメントの定義。とありますが、jには1/2という係数がつきませんでしたか?
とても鋭い質問です。 結論から先に言うと: ✅ 1点質量の慣性モーメントは (J = m r^2)(係数つかない) ✅ 円板や棒など“形のある物体”の慣性モーメントには、形状による係数がつく(1/2, 1/12 など) つまり、「1/2 がつくとき」と「つかないとき」は状況が違うのです。✅ 1. 1点質量の場合は必ず (J = mr^2)
たとえば、ひもで結んだ“点”のような質量が半径 (r) の円周を回るときは [ J = m r^2 ] これは最も基本の定義。 [ J = \sum_i m_i r_i^2 = \int r^2,dm ]✅ 2. 「1/2」「1/12」などの係数は“質量分布の形”による
例えば…● 一様円板(垂直軸まわり)
[ J = \frac12 m R^2 ]● 一様棒(端を通る軸まわり)
[ J = \frac13 m L^2 ]● 一様棒(中心まわり)
[ J = \frac{1}{12} m L^2 ]● 中空円筒
[ J = m R^2 ] これらの係数は [ J = \int r^2 dm ] を実際に積分した結果によって決まります。✅ 3. 係数がつく理由(質量分布の違い)
たとえば円板の場合:- たくさんの質量が「中心に近い r で」分布している → (mr^2) より小さくなる → 係数が 1/2 に
- 全質量が外周に集中している(輪のような物体) → すべて r = R → (J = mR^2)(係数 1)
✅ 4. あなたが見た式「J = m r^2」はどのケースか?
前の説明で出てきた [ mr^2 \equiv J ] は 1質点のモデル の話です。 これは- 物体が「1つの質点」とみなせる
- または回転運動を微小質点ごとに分解して導出している途中
✅ 5. 円板や棒の慣性モーメントに係数がつく理由を直感的に
例えば円板:真ん中の質量 → 半径小さい → Jへ貢献少ない
外周の質量 → 半径大きい → Jへ貢献大きい
✅ 6. まとめ
| モデル | 慣性モーメント |
|---|---|
| 1点質量 | (J = m r^2)(係数なし) |
| 同心円上に質量集中(輪) | (J = m R^2) |
| 一様円板 | (J = \frac12 m R^2) |
| 一様棒(中心) | (J = \frac{1}{12} m L^2) |
| 一様棒(端) | (J = \frac13 m L^2) |
もしよければ、 ✅ 各形状の J を実際に積分で導く ✅ 動く物体の“並進+回転”の一般式 ✅ 剛体の角運動量のベクトル形式 なども続けて説明できます!






コメント