AI(GPT等)との会話や独り言– category –
-

AI時代に広がる「Eggmaxing」とは?卵子凍結が変える未来と遺伝子編集の行方
はじめに 米国のテクノロジー専門メディアThe Informationが報じたことをきっかけに、シリコンバレーで「Eggmaxing(エッグマキシング)」という言葉が話題になっています。これは、筋トレの成果を最大化する「バルクアップ」のような感覚で、将来の選択肢を... -
サッカー向きの遺伝子は存在するのか?ACTN3、ACEと才能の本当の関係
フランス代表には、速く、強く、身体能力に優れた選手が多いと言われます。多様な出自を持つ選手が代表に名を連ねることから、「遺伝的な背景が強さに関係しているのでは」と感じたことがある人もいるかもしれません。では、サッカーに向いた遺伝子タイプ... -
最新工作機械トレンド2024–2026 ― 競争軸は「速さ」から「止まらない・段取りが短い・夜も動く」へ
最新工作機械トレンド2024–2026 ― 競争軸は「速さ」から「止まらない・段取りが短い・夜も動く」へ この記事の結論 2024年から2026年にかけての工作機械競争は、はっきりと潮目が変わりました。 かつての主役だった「主軸回転数」や「送り速度」といったカ... -
「産業総力戦」の時代が来た ― ドローン・AI・工作機械が変える戦争の前提と日本製造業の役割
ロシア・ウクライナ戦争とイラン情勢が示す「産業総力戦」への移行を分析。安価なドローン大量消費、AIと電子戦のソフトウェア競争、ウクライナ型民間製造エコシステム、中国の製造力優位、そして日本の工作機械・ロボット・半導体産業が持つ安全保障上の新たな価値を技術者・製造業関係者向けに解説する。 -
クロスローラ vs LMガイド ― 微細加工で本当に効く「剛性」とは何か【精密ステージ設計の基礎】
クロスローラガイドとLMガイドの構造・剛性・モーメント特性を物理レベルで比較。なぜガラス微細穴あけや半導体装置ではクロスローラが選ばれるのか、ピッチング・ローリング・ヨーイングの影響、ステッピングモータとの組み合わせまで、精密ステージ設計の本質を解説する。 -
Fusion 360のライセンスと機能の比較
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 Fusion 360のライセンスと機能の比較 Autodesk Fusion(旧称 Fusion 360)は、クラウドを利用し... -
小径ドリルによるガラス加工の文献調査レポート
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 小径ドリルによるガラス加工の文献調査レポート エグゼクティブサマリ 小径ドリルによるガラス加... -
Claude + Fusion MCPで植木鉢スタンドを設計してみたら、AI時代の3D CADがそこにあった
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 今回、ChatGPTでもMidjourneyでもなく、Anthropic Claude × Autodesk Fusion 360(MCP連携) で... -
「製造(DFM)」「組立(DFA)」「強度(DFS)」を考慮した設計
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 この動画は、経験豊富な機械設計エンジニアと初心者の違いは、単にCADが使えるかどうかではなく... -
3Dプリンターで作る園芸用鉢の最新情報
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 3Dプリンターで作る園芸用鉢の最新情報 概要 近年はデスクトップ型FDM(熱溶解積層)3Dプリンタ... -
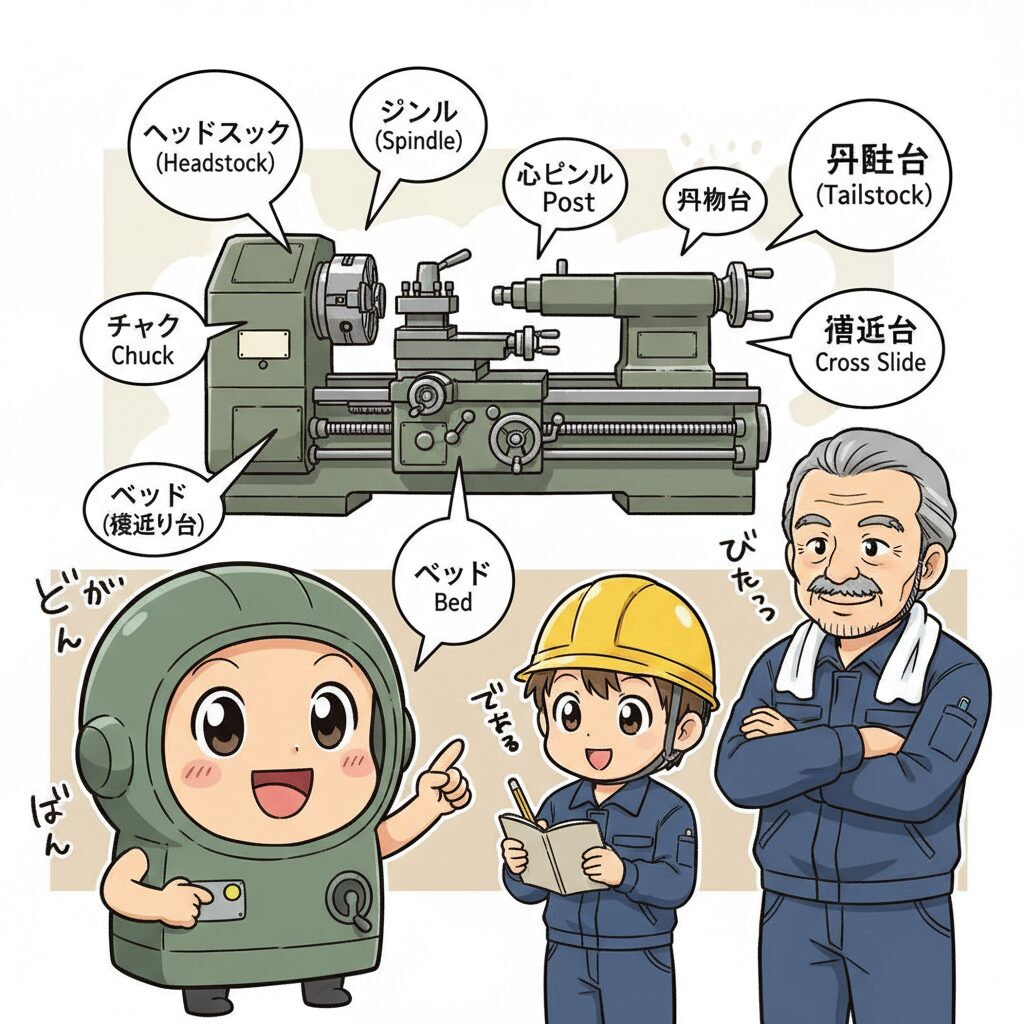
旋盤用中ぐりバイトの種類と最小加工内径・加工深さ(L/D比)
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 旋盤用中ぐりバイトの種類と最小加工内径・加工深さ(L/D比) 調査の背景 旋盤の内径加工では、... -
生爪の加工方法
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 生爪の加工方法 生爪とは(基礎知識) 生爪(なまづめ)は旋盤チャックに取り付ける軟らかい爪で... -
元OpenAIのAndrej Karpathy氏が提唱|Claude Codeで自分専用ナレッジベース(Wiki)を構築する方法
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 Karpathyが提唱したClaude Code活用術とは 元OpenAI研究者のAndrej Karpathy氏は、Claude Codeを... -
製造業のAI活用最前線|LLM・深層学習の応用事例と導入ポイント
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 製造業AIの現在地 製造業へのAI導入は「実証実験」から「本番稼働」の段階へ移行しつつある。特... -
町工場のDX入門|中小製造業のデジタル化を現場目線で解説
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 エグゼクティブサマリー 製造業の町工場におけるDX(デジタルトランスフォーメーション)とは、... -
PLM(製品ライフサイクル管理)とは?仕組み・導入メリットをわかりやすく解説
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 PLMとは何か PLM(Product Lifecycle Management:製品ライフサイクル管理)とは、製品の企画・... -
PLMとBOM連携の本質とは?製造業の情報管理を効率化する方法
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 PLMとBOM連携が製造業の核心 PLM(製品ライフサイクル管理)とBOM(Bill of Materials:部品表)... -
Kraken Roboticsとは?水中ロボット企業の技術・業績・将来性
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 Kraken Roboticsとは Kraken Robotics(クラーケン・ロボティクス)は、カナダに本拠を置く水中... -
Maven Smart Systemとは?事業内容と投資判断のポイント
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 Maven Smart System(メイブン・スマート・システム)調査報告 概要 Maven Smart System (MSS) ... -
Midjourneyの収益と課題|AI画像生成ビジネスの今後を分析
著者:副業の宮殿|製造業に携わる現役エンジニア。技術士試験対策書籍をKindleで複数出版。技術ブログ「副業の宮殿」にて製造業DX・AI活用の情報を発信中。 https://www.theinformation.com/articles/midjourney-profitable-chasing-hardware-dreams-can-...