 答え:① [ k<\dfrac{1}{3}m\omega^2 ]
答え:① [ k<\dfrac{1}{3}m\omega^2 ]
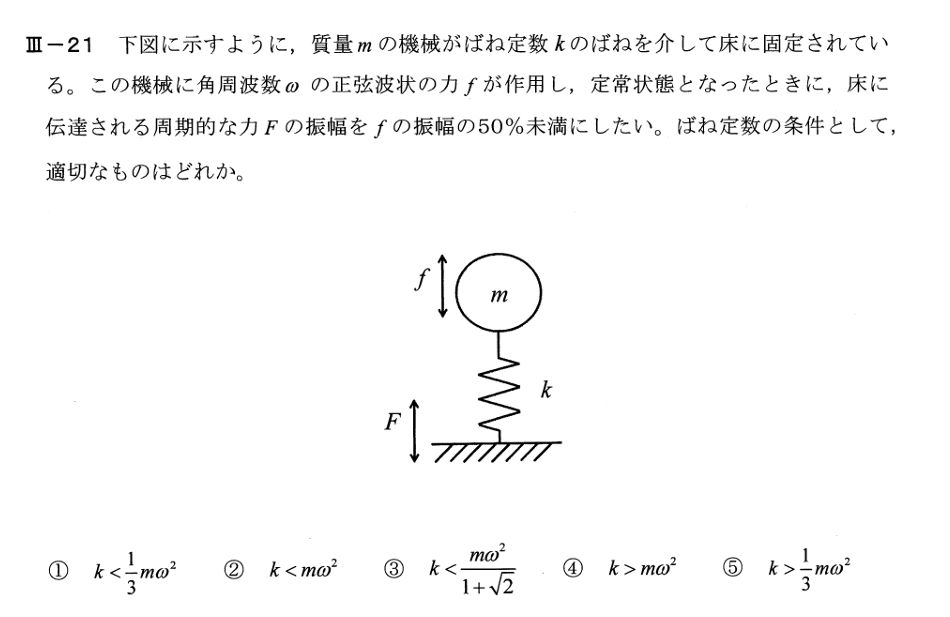
減衰なし・外力 [f_0\sin\omega t] の 1 自由度系 [ m\ddot x+kx=f_0\sin\omega t ]
定常応答の変位振幅 [ X=\frac{f_0}{|k-m\omega^2|} ]
床へ伝わる力はばね力(減衰なしなので): [ F = kX=\frac{k f_0}{|k-m\omega^2|} ]
したがって伝達率(トランスミッタンス) [ T \equiv \frac{F}{f_0}=\frac{k}{|k-m\omega^2|} ]
「床に伝わる力の振幅を (f) の 50% 未満」 [\Rightarrow\ T<0.5]. 場合分けして不等式を解く:
- [k\ge m\omega^2] のとき [T=\dfrac{k}{k-m\omega^2}\ge 1] で条件を満たせない。
- [k<m\omega^2] のとき [T=\dfrac{k}{m\omega^2-k}<\dfrac12 \Rightarrow 2k<m\omega^2-k \Rightarrow 3k<m\omega^2].
詳しく解説をお願いします
了解です。図の 1 自由度系(質量 (m)、ばね (k)、外力 (f(t)=f_0\sin\omega t))で、床へ伝わる力の振幅を外力振幅の 50% 未満にしたい、という設計条件をじっくり導きます。1) 運動方程式と定常解
減衰なしなので [ m\ddot x+kx=f_0\sin\omega t . ] 定常解( particular solution )を (x(t)=X\sin(\omega t-\phi)) とおくと、振幅は [ X=\frac{f_0}{|k-m\omega^2|}. ] (導出:複素表示 (x=Xe^{i\omega t}) を使えば ((k-m\omega^2)X=f_0))2) 床に伝わる力
減衰が無いので、床に伝わる周期力はばね力だけです: [ F(t)=k,x(t)\quad\Rightarrow\quad \text{振幅 } F = kX = \frac{k f_0}{|k-m\omega^2|}. ] そこで力の伝達率(トランスミッタンス) [ T\equiv\frac{F}{f_0}=\frac{k}{|k-m\omega^2|}. ]3) 50%未満の条件(不等式を解く)
求める条件は (T<0.5)。- もし (k\ge m\omega^2) なら [ T=\frac{k}{k-m\omega^2}\ge 1 ] で、絶対に 0.5 未満になりません(硬すぎる)。
- したがって (k<m\omega^2) の領域で解きます: [ T=\frac{k}{m\omega^2-k}<\frac12 \ \Rightarrow\ 2k<m\omega^2-k \ \Rightarrow \boxed{,3k<m\omega^2,}. ]
4) 自然周波数で見ると?
自然角振動数 (\omega_n=\sqrt{k/m})。上の条件は [ \omega_n<\frac{\omega}{\sqrt{3}}\approx 0.577,\omega . ] → **励振周波数の方が十分高い(柔らかく支持する)**と、床へ伝わる力が小さくなります。5) 物理直感
- (k) を小さく(柔らかく)すると、質量は高周波ではほぼ動かず、ばねが伸縮して外力を“吸収”。床に伝わる力 (F=kx) が小さくなる。
- 逆に (k) が大きい(剛支持)だと、質量と床がほぼ一体になり、外力のほとんどが床へ伝わる((T\simeq1) 以上)。
6) 減衰がある場合の補足(参考)
粘性減衰 (c) があると [ T=\frac{\sqrt{k^2+(c\omega)^2}}{\sqrt{(k-m\omega^2)^2+(c\omega)^2}} ] で、床へはばね力+ダンパ力が伝わります。一般に- 防振域の目安:(\omega/\omega_n>\sqrt{2})(力伝達率 < 1)。
- 本問の「50% 未満」は (\omega/\omega_n>1/!0.577\approx1.73) と、(\sqrt{2}) より厳しめの要求です。
7) 設計のまとめ
- 与えられた (m,\ \omega) に対して、ばねは [ \boxed{,k<\frac{1}{3}m\omega^2,} ] を満たすように十分柔らかく選ぶ。
- 実機では減衰・共振回避・たわみ量(静たわみ (\delta=m g/k))の制約も併せて確認する。
定常解( particular solution )を ( ) = sin ( − ) x(t)=Xsin(ωt−ϕ) とおくと、振幅は = 0 ∣ − 2 ∣ . X= ∣k−mω 2 ∣ f 0. (導出:複素表示 = x=Xe iωt を使えば ( − 2 ) = 0 (k−mω 2 )X=f 0) を詳しく教えてください。
いいね、その1行を“ちゃんと”導きましょう。やり方は2通りあります。1) 複素表示(いちばん楽)
強制振動: [ m\ddot x+kx=f_0\sin\omega t ] を“複素正弦”に置き換えます。右辺を [ f_0\sin\omega t=\Im{,f_0 e^{i\omega t},} ] と見なし、解も [ x(t)=\Im{,\tilde X e^{i\omega t},} ] と仮定します((\tilde X) は複素振幅)。 すると [ \dot x=\Im{,i\omega \tilde X e^{i\omega t},},\quad \ddot x=\Im{,(-\omega^2)\tilde X e^{i\omega t},}. ] 元の式の “複素版” は [ m(-\omega^2)\tilde X e^{i\omega t}+k,\tilde X e^{i\omega t}=f_0 e^{i\omega t}. ] 共通因子 (e^{i\omega t}\neq 0) を割って [ (k-m\omega^2)\tilde X=f_0 \quad\Rightarrow\quad \tilde X=\frac{f_0}{k-m\omega^2}. ] このときの実際の変位は [ x(t)=\Im{\tilde X e^{i\omega t}} =|\tilde X|\sin(\omega t-\phi), ] (\phi=\arg\tilde X)。 本問題(無減衰)では (k-m\omega^2) は実数なので [ |\tilde X|=\frac{f_0}{|k-m\omega^2|},\qquad \phi=\begin{cases} 0 & (\omega<\omega_n=\sqrt{k/m})\ \pi & (\omega>\omega_n) \end{cases} ] となり、求める振幅 [ \boxed{X=\dfrac{f_0}{|k-m\omega^2|}} ] が出ます。 ((\omega=\omega_n) では分母0→共振で発散:定常解は無限大。)2) 実関数だけで(位相も見たい人向け)
定常解を [ x(t)=X\sin(\omega t-\phi) ] と置くと [ \ddot x=-\omega^2 X\sin(\omega t-\phi). ] 方程式へ代入: [ m(-\omega^2)X\sin(\omega t-\phi)+kX\sin(\omega t-\phi)=f_0\sin\omega t. ] 左辺を (\sin(\omega t)) と (\cos(\omega t)) に展開: [ (k-m\omega^2)X,[\sin\omega t\cos\phi-\cos\omega t\sin\phi]=f_0\sin\omega t. ] (\sin\omega t) と (\cos\omega t) の係数を比較して [ \begin{cases} (k-m\omega^2)X\cos\phi=f_0,\ (k-m\omega^2)X\sin\phi=0. \end{cases} ] よって [ \sin\phi=0\ \Rightarrow\ \phi=0 \text{ か } \pi,\qquad X=\dfrac{f_0}{|k-m\omega^2|}. ] ((\phi) の符号は (k-m\omega^2) の符号で決まり、無減衰では 0/π の二択。)目次
補足(減衰があるとどうなる?)
(c\dot x) を入れると [ m\ddot x+c\dot x+kx=f_0\sin\omega t ] 同様に複素法で [ \tilde X=\frac{f_0}{k-m\omega^2+i c\omega}, \quad X=\frac{f_0}{\sqrt{(k-m\omega^2)^2+(c\omega)^2}}, \quad \tan\phi=\frac{c\omega}{k-m\omega^2}. ] (この形はよく使うので覚えておくと便利。)これで「複素表示を使うと一発で ((k-m\omega^2)\tilde X=f_0) に落ちる → 振幅は (f_0/|k-m\omega^2|)」の意味が腹落ちするはず。
ℑ{f0eiωt}はどういう意味ですか
良い質問です。 [ \Im{,f_0 e^{i\omega t},} ] は複素数 (f_0 e^{i\omega t}) の「虚部(imaginary part)」を取り出すという意味です。
✅ そもそも (e^{i\omega t}) とは?
オイラーの公式: [ e^{i\theta} = \cos\theta + i\sin\theta ] これを使うと [ e^{i\omega t} = \cos(\omega t) + i\sin(\omega t) ]✅ (\Im{\cdot}) の意味
[ \Im{z} = \text{複素数 (z) の虚数部分} ] 例: [ z = 3 + 4i \quad\Rightarrow\quad \Im{z} = 4 ]✅ (\Im{f_0 e^{i\omega t}}) を計算すると?
[ f_0 e^{i\omega t} = f_0 (\cos\omega t + i\sin\omega t) ] 虚部だけを取り出すので [ \Im{f_0 e^{i\omega t}} = f_0 \sin(\omega t) ] つまり [ \boxed{ \Im{,f_0 e^{i\omega t}} = f_0 \sin\omega t } ] **「(\sin)波を、複素指数の虚部として表している」**わけです。✅ なぜこんなことをするの?
理由はシンプル:- (e^{i\omega t}) を使うと微分が簡単になる
- 振動方程式を代数方程式にできる
✅ イメージ図
複素平面
imaginary (虚部)
↑
sin | e^{iωt} の虚部 → sin波
wave |
|
--------+----------→ real (実部)
| cos波
✅ まとめ
| 記号 | 意味 |
|---|---|
| (\Im{\cdot}) | 虚部を取り出す |
| (\Re{\cdot}) | 実部を取り出す |
| (e^{i\omega t}) | (\cos + i\sin) の複素表現 |
必要なら:
- 実部表現((\Re{\cdot}))での導出
- なぜ複素数を使って良いのかの数学的説明
- Matplotlibで可視化(サイン波と複素指数の対応)
外力が正弦だと、解も正弦の形をとるとみなせるのですか
はい、線形(かつ時間不変)な振動系では、 外力が正弦であれば定常応答も正弦になるとみなすことができます。 これはとても重要な性質です。✅ なぜ「正弦 → 正弦」になるの?
理由は 線形性(superposition) と 時間不変性 にあります。 線形時不変(LTI)系の特徴:入力が正弦波なら、出力も同じ周波数の正弦波になる (振幅と位相が変わるだけ)数学的には、線形微分方程式 [ m\ddot{x}+c\dot{x}+kx = f_0\sin(\omega t) ] の particular 解(定常解)は [ x(t)=X\sin(\omega t – \phi) ] となることが原理的に保証されています。 振幅 (X) と位相遅れ (\phi) が変わるだけ。
✅ 物理的な直感
- バネ-質点系は「線形フィルタ」として振る舞う
- 正弦波は「フィルタを通しても形が変わらない」
- 出てくるのは同じ周波数の正弦波(位相と大きさだけ変化)
正弦波は線形システムの固有入力 → システムを通っても波形が崩れない
✅ 例:抵抗・インダクタ・コンデンサ回路も同じ
交流回路(RLC)に正弦電圧を入れると 電流も正弦になります(振幅と位相が変わるだけ) それと全く同じ理屈です。✅ では、なぜ解に指数・余弦・正弦を使うの?
線形の2階微分方程式は [ m\ddot{x}+c\dot{x}+kx = f(t) ] 解 = 過渡応答 + 定常応答- 過渡応答:指数減衰 (e^{-\zeta\omega_n t}) → 時間とともに消える
- 定常応答:外力と同じ周波数の正弦
✅ もし外力が正弦でなかったら?
例:矩形波、三角波、インパルス… → フーリエ解析で正弦波の和に分解できる → 各正弦入力に対する応答を足し合わせる(線形性) だから 正弦を基本として考えれば十分 なのです。✅ まとめ
| 質問 | 答え |
|---|---|
| 正弦入力 → 解も正弦? | はい、線形系では必ずそうなる |
| 例外は? | 非線形系(摩擦、バックラッシュなど) |
| 関連原理 | LTI 系、フーリエ、重ね合わせ、固有解 |
✅ 一言で
線形振動系は正弦波に対して正弦波で応じる (周波数は変わらない、振幅と位相が変わるだけ)
必要なら次は、
- 位相遅れの意味
- なぜ過渡応答が消えるのか
- 非線形ならどうなるか(跳躍現象など)
外力がない場合はXeiwtとおいて余弦もいれますよね
はい、正しい気づきです。 外力がない自由振動の場合は、一般解は余弦(または正弦)をふくむ形になります。 あなたが言いたいのはこうですね:強制振動で (x = X e^{i\omega t}) を仮定したけど、 自由振動でも (x = X e^{i\omega_n t}) と置くと、余弦成分はどこにいったの? 本来は (\cos) も (\sin) も入るよね?まさにその通りです。 ここを完全に理解すると、振動の複素表現が一気にクリアになります。
✅ 自由振動の一般解
外力なし: [ m\ddot x + kx = 0 ] 解は [ x(t)=A\cos(\omega_n t) + B\sin(\omega_n t) ] です。 これは一般解。✅ でも複素解で書くとどうなる?
試しに [ x(t)=X e^{i\omega_n t} ] を代入すると [ \ddot x = -\omega_n^2 X e^{i\omega_n t} ] 方程式に代入すると成り立つ → つまりこれも解。 しかしこれは 一般解の片側だけです。 実際、一般解は複素指数を2つ使うと表せます: [ x(t) = C_1 e^{i\omega_n t} + C_2 e^{-i\omega_n t} ] ここで [ e^{i\omega t} = \cos\omega t + i\sin\omega t,\quad e^{-i\omega t} = \cos\omega t – i\sin\omega t ] なので、和をとると余弦+正弦の組み合わせになります。 つまり自由振動は (e^{i\omega t}) と (e^{-i\omega t}) の合成
✅ なぜ強制振動では 1つだけでいいの?
強制振動(定常解)では- 求めたいのは同じ周波数の Particular solution
- 過渡成分(自由振動)は時間とともに消える(減衰ありの場合)
✅ まとめ
| 状況 | 複素形 | 意味 |
|---|---|---|
| 自由振動 | (x=C_1 e^{i\omega_n t}+C_2 e^{-i\omega_n t}) | 一般解((\cos)+(\sin)) |
| 強制振動(定常) | (x=X e^{i\omega t}) | particular 解だけ。初期応答は別扱い |
✅ 一言で
自由振動は複素指数2つ(+−)=余弦+正弦 強制振動の定常解は複素指数1つでOK(もう片方は過渡)
必要なら次、
- 減衰がある場合の (e^{(-\zeta\omega_n\pm i\omega_d)t})
- 初期条件から (C_1, C_2) を求める方法
- フーリエの「正弦波は線形系の固有入力」の話







コメント