
自立走行(自律走行)には、使う情報・地図の有無・知能の置き場所によって、いくつかの代表的な**種別(アーキテクチャ)**があります。
研究・製品・用途(工場/屋外/家庭)で最適解が異なるのがポイントです。
目次
① 反応型(Reactive Navigation)
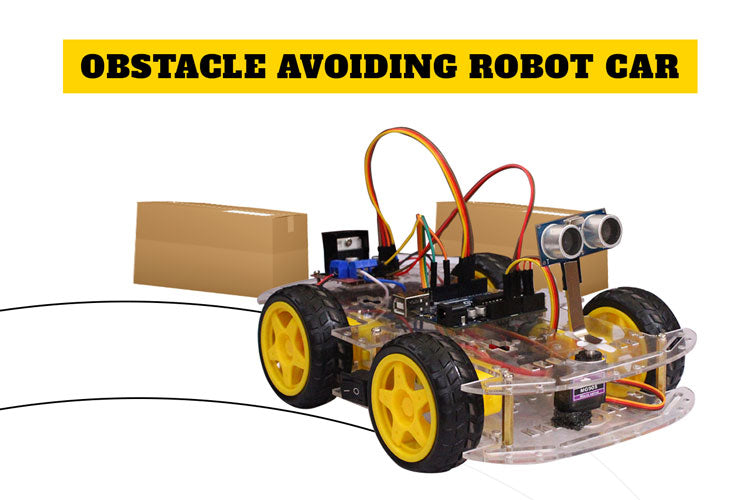

特徴
- 地図を持たず、その場のセンサ入力に即応
- 「近い障害物→避ける」などのルールベース
使うセンサ
- 超音波、赤外、バンパー、簡易LiDAR
メリット
- 軽量・安価・壊れにくい
- 計算資源がほぼ不要
デメリット
- 迷いやすい、遠回りしがち
- 目的地概念が弱い
用途例
- ロボット掃除機(初期世代)
- 教育用ロボット
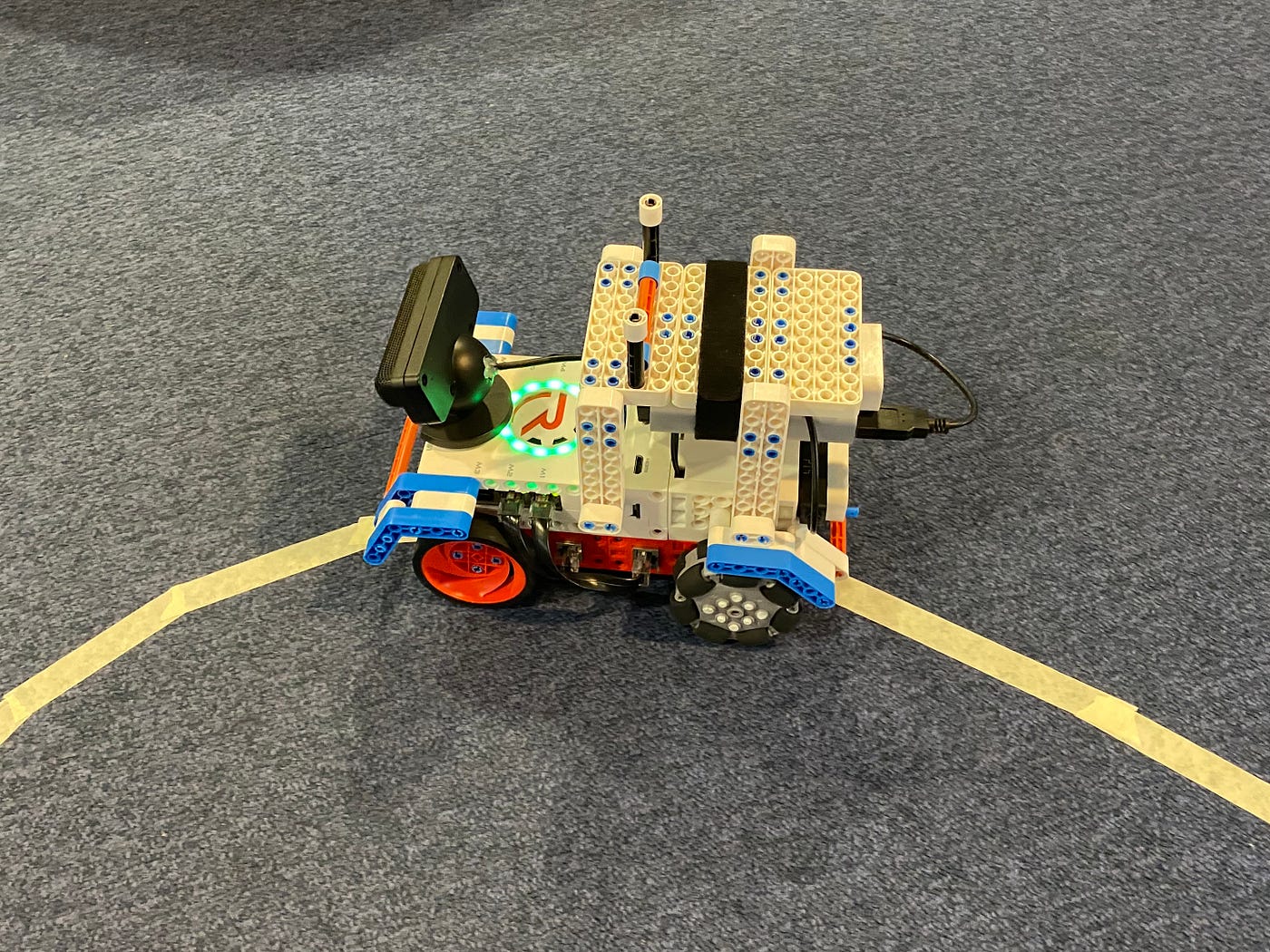
② ライン・マーカー追従型(ガイド付き自立走行)


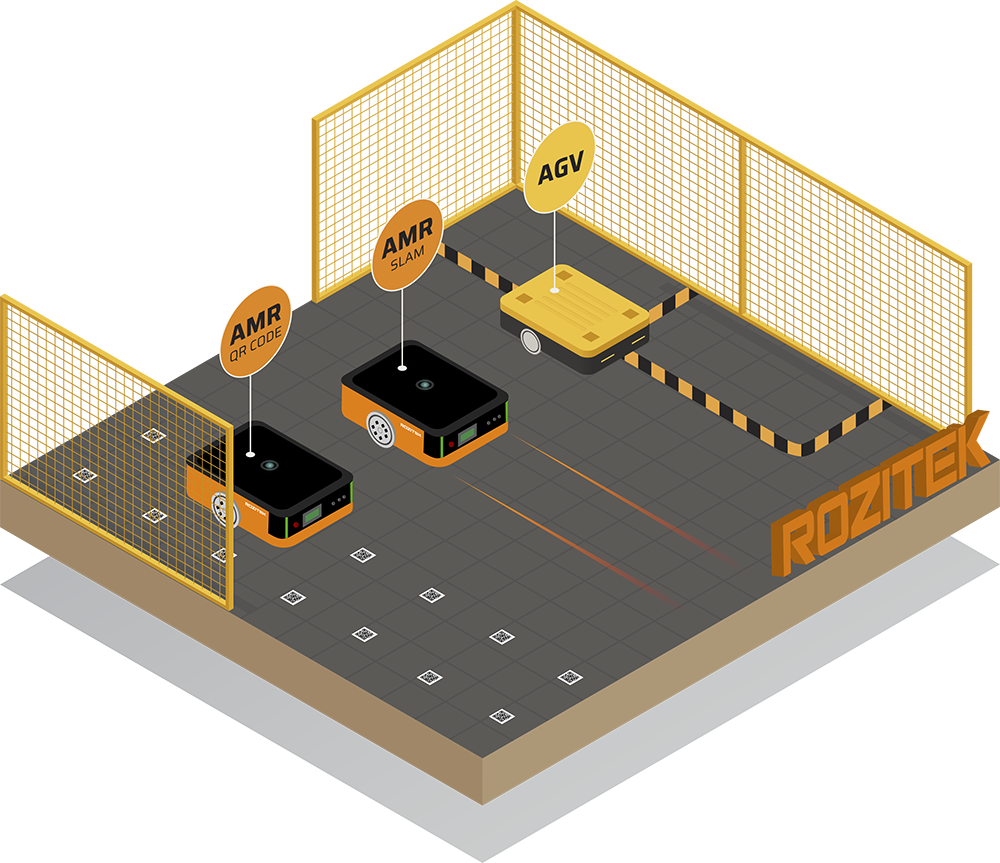
特徴
- 床のライン・磁気テープ・QRマーカーを追従
- 環境側に“知能”を置く方式
メリット
- 安定・高精度
- 導入が簡単(工場向け)
デメリット
- レイアウト変更に弱い
- 屋外や雪環境では不利
用途例
- AGV(工場搬送)
- 倉庫ロボット
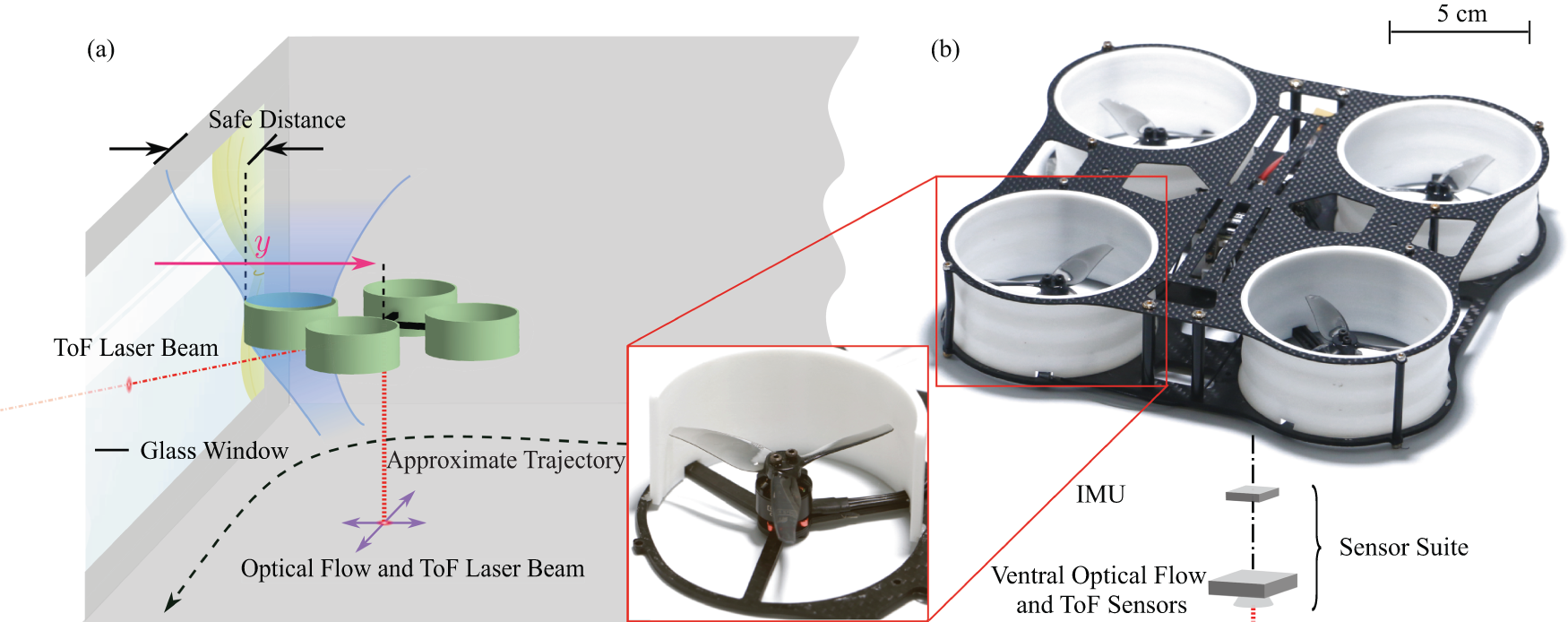
③ 地図ベース自律走行(SLAM系)
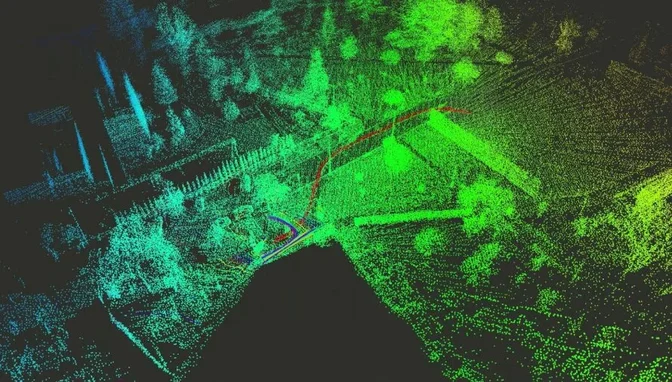
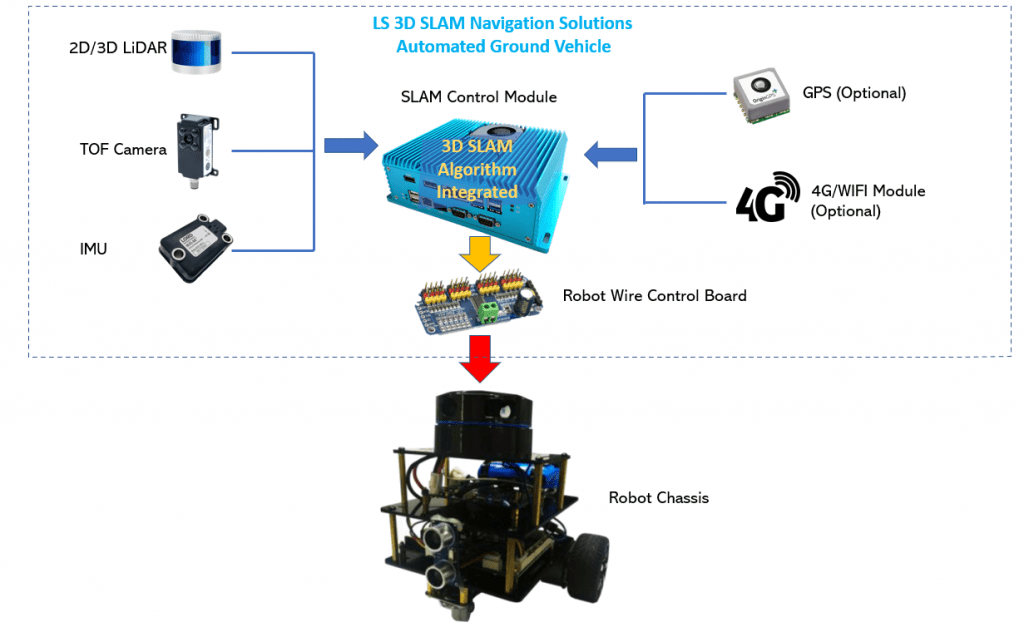

特徴
- 自分で地図を作り(SLAM)、その地図上で自己位置推定
- 3D/2Dマップを使う
使うセンサ
- LiDAR、カメラ、IMU、車輪オドメトリ
メリット
- 未知環境に対応
- 目的地指定が可能
デメリット
- 計算負荷が高い
- 環境変化(雪・夜・模様変化)に弱い場合あり
用途例
- AMR(自律搬送ロボット)
- 屋内配送ロボット
④ 教示再現型(Teach & Repeat / VPR)

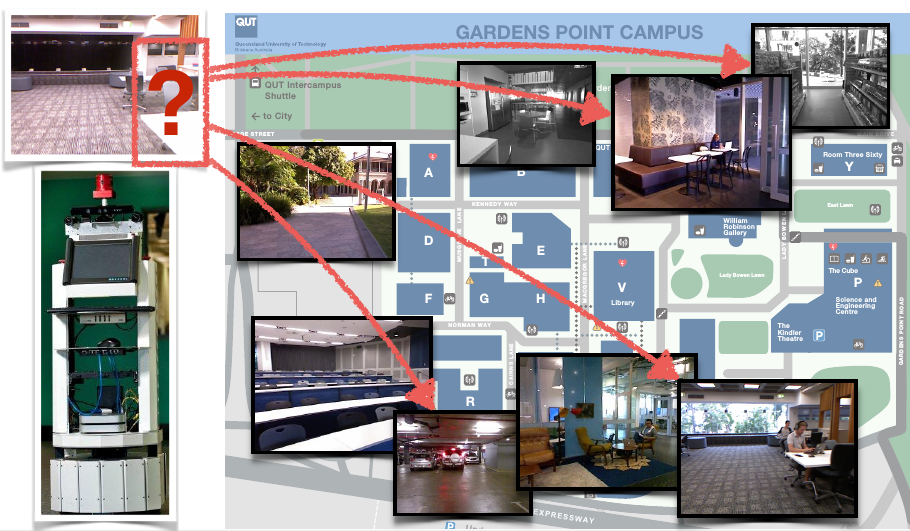
特徴
- 人が一度走らせたルートを記憶
- カメラ画像の類似度で自己位置を推定
メリット
- 地図生成不要
- 計算量が小さい
- 実環境(雪・夜)に比較的強い設計が可能
デメリット
- 未教示ルートは走れない
- ルート依存
用途例
- 巡回ロボット
- 除雪機・警備ロボット
⑤ セマンティック・学習型(AI主導)

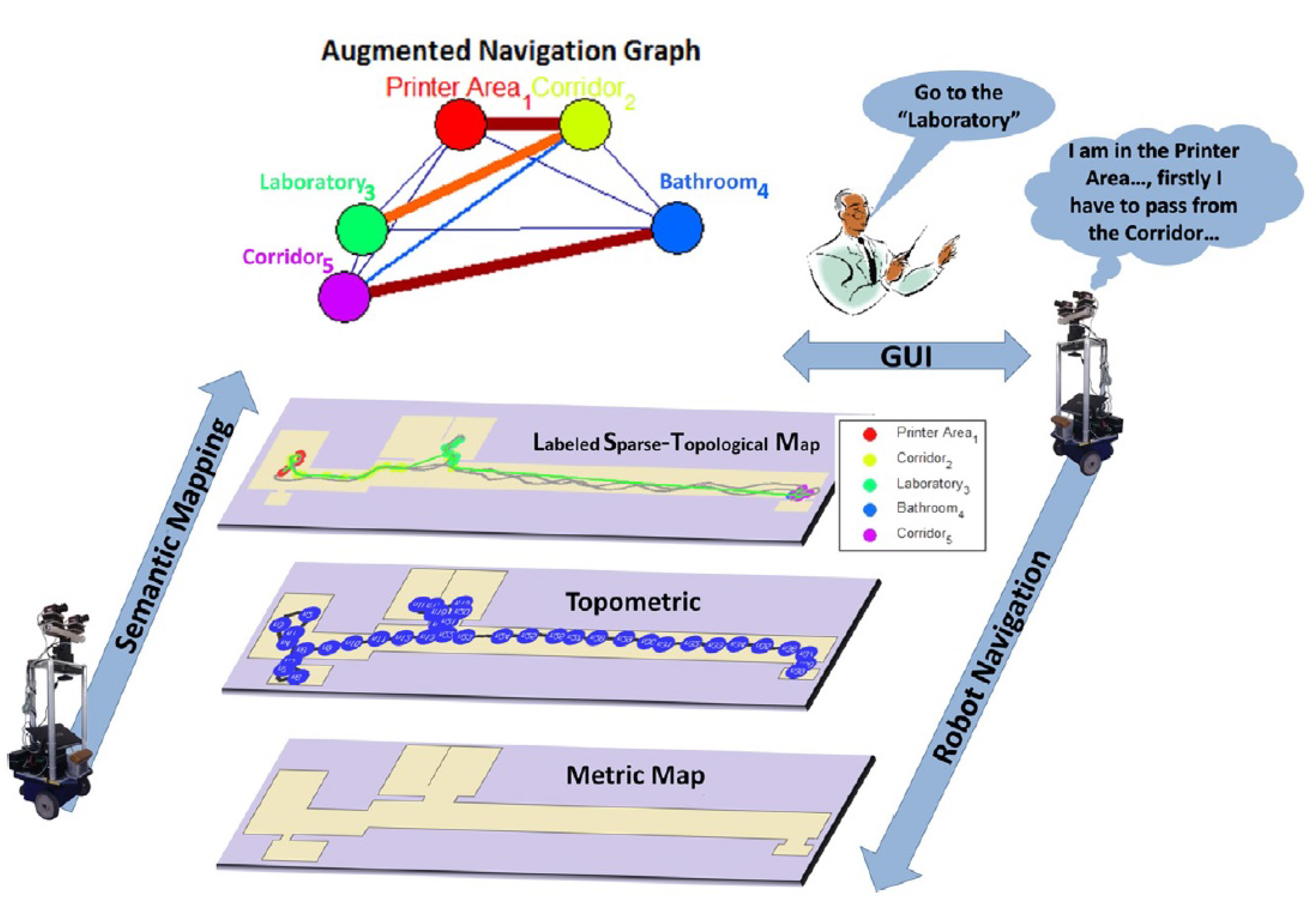

特徴
- カメラ映像 → 行動をNNが直接出力
- 意味理解(道路・人・障害物)
メリット
- 汎用性が高い
- 人間に近い判断
デメリット
- 学習コスト・検証コストが大
- ブラックボックス性
用途例
- 自動運転車
- 研究用途
⑥ ハイブリッド型(実用の主流)


特徴
- 複数方式を組み合わせる
- 例:Teach & Repeat + 障害物回避
- 例:SLAM + 反応制御
メリット
- 安定性・安全性が高い
- 実装自由度が高い
デメリット
- 設計がやや複雑
用途例
- 実用AMR
- 屋外ロボット・除雪ロボット
まとめ(整理表)
| 種別 | 地図 | 計算量 | 環境変化耐性 | 代表用途 |
|---|---|---|---|---|
| 反応型 | 不要 | ◎ | △ | 掃除機 |
| ライン追従 | 不要 | ◎ | × | 工場AGV |
| SLAM | 必要 | △〜× | △ | AMR |
| Teach & Repeat | 教示ルート | ◎ | ○ | 巡回・除雪 |
| 学習型AI | 不要/内部表現 | × | ◎ | 自動運転 |
| ハイブリッド | 状況依存 | ○ | ◎ | 実用全般 |






コメント