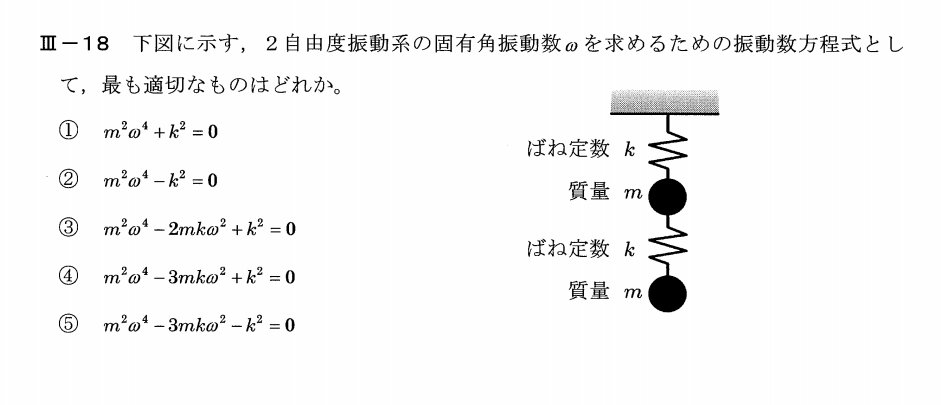
 運動方程式は
$ m\frac{ d^2x_1 }{dt^2} + 2kx_1 – kx_2 = 0$
$ m\frac{ d^2x_2 }{dt^2} + k_2(x_2 – x_1)= 0$
と書ける。
ここで、
x1=X1cosωt
x2=X2cosωt
と仮定しこれを満たす、振動数方程式を導出すると
$\begin{vmatrix}
-mω^2+2k & -k \\
-k & k -mω^2
\end{vmatrix}=0$
これを展開して、
$ m^2ω^4-3mkω^2 + k^2 = 0$
[解答]④
参考:二自由度系の振動(3)
運動方程式は
$ m\frac{ d^2x_1 }{dt^2} + 2kx_1 – kx_2 = 0$
$ m\frac{ d^2x_2 }{dt^2} + k_2(x_2 – x_1)= 0$
と書ける。
ここで、
x1=X1cosωt
x2=X2cosωt
と仮定しこれを満たす、振動数方程式を導出すると
$\begin{vmatrix}
-mω^2+2k & -k \\
-k & k -mω^2
\end{vmatrix}=0$
これを展開して、
$ m^2ω^4-3mkω^2 + k^2 = 0$
[解答]④
参考:二自由度系の振動(3)
平成25年度技術士第一次試験問題[機械部門] 専門科目Ⅲ-18 2自由度振動系の状態方程式
運動方程式は
$ m\frac{ d^2x_1 }{dt^2} + 2kx_1 – kx_2 = 0$
$ m\frac{ d^2x_2 }{dt^2} + k_2(x_2 – x_1)= 0$
と書ける。
ここで、
x1=X1cosωt
x2=X2cosωt
と仮定しこれを満たす、振動数方程式を導出すると
$\begin{vmatrix}
-mω^2+2k & -k \\
-k & k -mω^2
\end{vmatrix}=0$
これを展開して、
$ m^2ω^4-3mkω^2 + k^2 = 0$
[解答]④
参考:二自由度系の振動(3)
この記事を書いた人
関連記事
-
 図面検査をAIにやらせる「図検AI」を作った ― Claude Vision × RAG で、現場のチェック作業を助ける
図面検査をAIにやらせる「図検AI」を作った ― Claude Vision × RAG で、現場のチェック作業を助ける -
AIを使って20年もののプログラムの間違いを修正した。試験片の見えない段差
-
Claude Codeに数ヶ月スパンの仕事を任せる方法──CLAUDE.md・日報・STATUS.mdの三点セット運用
-
町工場AIにローカルLLMは要らない ― コスト試算で分かった現実
-
Claude CodeにWordPress運用を任せたら、パスワードが平文で112行残っていた話
-
【実践レビュー】Claudeと”作業しながら”マニュアルを作る新しい仕事術 — 未知の精密装置の評価で分かった圧倒的な効率化
-
工場のAIX(AI Transformation)はどこまで進むのか?オープンAIモデルが変える次世代スマートファクトリー
-
Bambu Labはどれを買えばいい?A1 mini・P2S・AMS・フィラメント選びを個人向けに整理







コメント