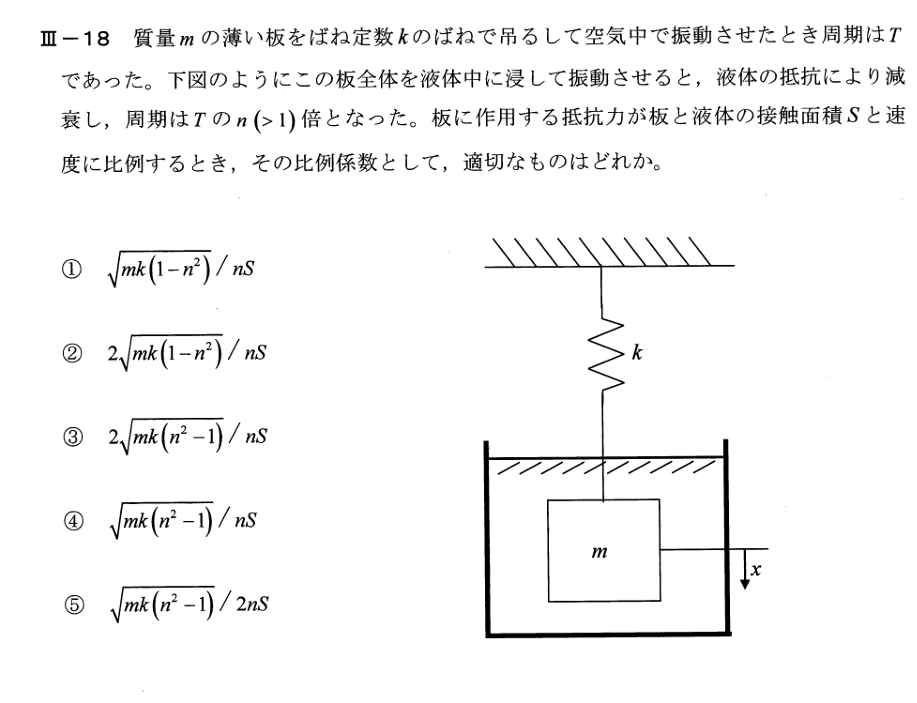
設問の系を空気中で振動させた場合の運動方程式は
$ m\ddot{ x } +kx= 0$
固有角振動数と周期は
$ ω = \sqrt{\frac{ k }{m}} $
$ T = \frac{ 2π }{ω}=2π\sqrt{\frac{ m }{k}} $
となる。
液体中での運動方程式は
$ m\ddot{ x } +c\dot{ x }+kx= 0$
抵抗力はSと速度に比例するので、
$ m\ddot{ x } +c’S\dot{ x }+kx= 0$
固有角振動数と周期は
$ ω = \frac{\sqrt{4mk-(c’S)^2}}{2m} $
$ T = \frac{ 2π }{ω}=\frac{4mπ}{\sqrt{4mk-(c’S)^2}} $
題意より周期は空気中のn倍なので、
$ 2πn\sqrt{\frac{ m }{k}} =\frac{4mπ}{\sqrt{4mk-(c’S)^2}} $
$ c’ =\frac{2\sqrt{mk(n^2-1)}}{nS} $
[解答]③
参考
1自由度系の振動の振幅ζ と減衰比(H25)
詳しく教えて下さい
了解!図の設定を式に落として、最後に選択肢③になるところまで丁寧に追います。
問題の整理
- 空気中(減衰なし)で周期:(T)
(\displaystyle \omega_n=\frac{2\pi}{T}=\sqrt{\frac{k}{m}}) - 液体中では、「速度比例」の抵抗(粘性減衰)を受ける:
抵抗力 (F_d=(\alpha S),\dot x)
→ 等価減衰係数 (c=\alpha S)(求めたいのは (\alpha)) - 液体中の周期は (T_d=nT)((n>1))
減衰1自由度の基礎式
減衰ありの運動方程式:
[
m\ddot x+c\dot x+kx=0 \quad (c=\alpha S)
]
固有値 (\lambda) は
[
m\lambda^2+c\lambda+k=0
\Rightarrow
\lambda=-\frac{c}{2m}\pm i\omega_d
]
ここで減衰固有角振動数
[
\omega_d=\sqrt{\omega_n^2-\left(\frac{c}{2m}\right)^2},\qquad
\omega_n=\sqrt{\frac{k}{m}}
]
周期は
[
T_d=\frac{2\pi}{\omega_d},\qquad
T=\frac{2\pi}{\omega_n}
]
「周期が (n) 倍」から (c) を求める
[
n=\frac{T_d}{T}=\frac{\omega_n}{\omega_d}
=\frac{1}{\sqrt{1-\left(\frac{c}{2m\omega_n}\right)^2}}
]
両辺を変形して
[
\left(\frac{c}{2m\omega_n}\right)^2
=1-\frac{1}{n^2}
=\frac{n^2-1}{n^2}
]
[
\Rightarrow\quad
c=\frac{2m\omega_n}{n}\sqrt{n^2-1}
=\frac{2}{n}\sqrt{m^2\omega_n^2,(n^2-1)}
]
(,m\omega_n=\sqrt{mk},)(※ (\omega_n=\sqrt{k/m}) より)なので
[
c=\frac{2}{n}\sqrt{mk,(n^2-1)}
]
比例係数 (\alpha) を出す
[
\alpha=\frac{c}{S}
=\boxed{\frac{2\sqrt{mk,(n^{2}-1)}}{nS}}
]
→ 選択肢③
ちょい確認(次元と極限)
- 次元:(\sqrt{mk}) は ([\mathrm{kg}/\mathrm{s}])。
(\alpha) は ([\mathrm{kg}/(\mathrm{s},\mathrm{m}^2)] = [\mathrm{N,s}/\mathrm{m}^3]) で、(F_d=(\alpha S)\dot x) の単位 ([\mathrm{N}]) に合う。 - (n\to1)(周期ほぼ変化なし)で (\alpha\to0):抵抗なしに一致。
- 減衰条件:(\omega_d) 実数 ⇒ (c<2\sqrt{mk})(アンダーダンピング)。本式はその範囲で成り立つ。
これで、液体による速度比例の抵抗が周期を (n) 倍にしたときの比例係数が厳密に導けました。
固有角振動数はルートの中身だけですか?固有値の時はルートの前に-cという項がありますがそれは関係なくなりますか?
とても良い質問です。
固有角振動数(=振動の“周波数”)と、固有値(=時間に対する指数解の“係数”)の違いが本質になります。
以下、結論 → 理由 → 図式まとめでしっかり整理します。
✅ 結論
固有角振動数(ω)は、固有値 λ の “虚部の絶対値” のみで決まる。
固有値
[
\lambda = -\frac{c}{2m} \pm i \omega_d
]
のうち
- 実部:(-c/(2m)) → 減衰による「減り方」を決める
- 虚部:(\omega_d) → 振動の「速さ」(角振動数)を決める
したがって
✅ **固有角振動数は、√ の中身(虚数部分)だけであり、
前の (-c/2m) は周波数には関係しない。**
✅ 理由(なぜ -c/2m が関係しないのか?)
減衰振動の一般解は
[
x(t)=e^{-\frac{c}{2m}t} \left(A\cos\omega_d t + B\sin\omega_d t\right)
]
ここで分離して考えると:
| 部分 | 役割 |
|---|---|
| (e^{-ct/(2m)}) | 振幅が時間とともに減っていく(減衰) |
| (\cos\omega_d t, \sin\omega_d t) | 振動の“周期”や“速さ”を決める |
つまり
周波数(振動の速さ)だけを決めるのは虚部 (\omega_d)
実部((-c/2m))は 周波数には影響しない
→ ただし振幅が時間とともに小さくなる速度を決めるだけ。
✅「固有値」と「固有角振動数」の違い
✅ 固有値 λ
指数解 (e^{\lambda t}) に出てくるもの
[
\lambda = -\frac{c}{2m} \pm i\omega_d
]
✅ 固有角振動数 ω(減衰固有角振動数)
固有値の虚部の絶対値
[
\omega_d = \sqrt{\omega_n^2 – \left(\frac{c}{2m}\right)^2}
]
つまり
- 固有値 λ:減衰も含んだ「複素数」
- 固有角振動数 ω:そのうち“振動”のみを表す量
✅ 図で整理
固有値
λ = - 応答の減衰速度(実部)
± i × 振動の速さ(虚部 = 固有角振動数)
減衰の有無
┌───────────────┐
│実部(−c/2m) ⇒ 振幅が減る速さだけを決める│
│虚部(ωd) ⇒ 振動周期を決める │
└───────────────┘
✅ まとめ(質問に直接答える)
固有角振動数はルートの中身だけですか?
✅ はい。
固有角振動数 (\omega_d) は
[
\omega_d = \sqrt{\frac{k}{m}-\left(\frac{c}{2m}\right)^2}
]
の √ 内だけ が関係する。
固有値の時はルートの前に −c の項がありますがそれは関係なくなりますか?
✅ はい、振動の周期(角振動数)を考えるときは無関係です。
その項は「減衰の速さ」を表すだけで「振動の速さ」には影響しません。
必要なら、
✅ 物理的イメージ図
✅ 実部が周波数に影響しない理由の数学的証明
✅ 強制振動での応答周波数との違い
なども詳しく説明できます!
周期は固有角振動数の逆数に2πをかけますか?
はい、その通りです。
周期 (T) と角振動数 (\omega) の関係は
[
\boxed{T=\frac{2\pi}{\omega}}
]
です。
✅ 【減衰なし】のとき
固有角振動数:
[
\omega_n=\sqrt{\frac{k}{m}}
]
周期:
[
T=\frac{2\pi}{\omega_n}
]
✅ 【減衰あり(アンダーダンピング)】のとき
固有値は
[
\lambda=-\frac{c}{2m}\pm i\omega_d
]
この「虚部の絶対値」 (\omega_d) が 実際に振動する速さ です。
周期:
[
\boxed{T_d=\frac{2\pi}{\omega_d}}
]
※減衰しても周期は
- 減衰固有角振動数 (\omega_d) で決まる
- 実部 (-c/(2m)) は周期には関係しない(振幅が減るだけ)
✅ なぜ 2π をかける?
角振動数の定義
[
\omega = \frac{\text{単位時間あたりの位相変化量(rad/s)}}
{1 \text{秒}}
]
周期は「1周=2π rad 進むのにかかる時間」なので
[
T = \frac{2\pi\ \text{rad}}{\omega\ \text{rad/s}}
]
というだけです。
✅ まとめ
- 周期 = (2\pi / \omega)
- 減衰ありでも同じ
- 使うのは固有値のうちの 虚部(角振動数)だけ
もし希望があれば
✅ 減衰が周期にどう影響するか(わずかに長くなる理由)
✅ 実部と虚部の役割の図解
✅ 問題 III–18 の周期計算の丁寧な復元
も追加で説明します!
振動は上下運動なのに、周波数hzではなく角振動数になるのはなぜですか?
とても良い質問です。
「上下運動なのに、なぜ普通の周波数(Hz)ではなく“角振動数(rad/s)”を使うのか?」
これには 数学的理由 と 物理的理由 の両方があります。
結論から言うと:
✅ 結論
角振動数(rad/s)のほうが、方程式が“自動的にきれいな形になる”から。
そして
固有値(複素数)の形と直接対応するから。
Hz を使うと式がぐちゃぐちゃになります。
✅ 1. 振動は三角関数で表されるから
ばね振動の解は
[
x(t) = A\cos(\omega t – \phi)
]
ここで、
[
\omega t
]
は 位相(フェーズ)です。
位相は「ラジアン(rad)」で表します。
- 1 周 = (2\pi) rad
- 1 秒で (\omega) rad 進む → (\omega) は「位相の時間変化率」
✅ 2. 角振動数は「三角関数の中で直接使える周波数」
三角関数の中身(位相)は必ずラジアンで表すので、
[
\text{三角関数の周期的な運動} \quad \Rightarrow\quad \text{自然に角振動数が登場する}
]
つまり、
- 上下運動の位置
- 速度
- 加速度
全てが 三角関数の微分 で出てくるので、
自然に (\omega) が出る。
✅ 3. なぜ Hz(f)を使わないのか?
使えます。ただし、式が汚くなる。
[
\omega = 2\pi f
]
なので
- 位置:
[
x(t)=A\cos(2\pi ft)
] - 速度:
[
v(t) = -2\pi f A\sin(2\pi ft)
] - 加速度:
[
a(t)=-(2\pi f)^2 A\cos(2\pi ft)
]
これを運動方程式に入れると「(2\pi)” が大量に登場してしまう」。
✅ 4. 運動方程式が一発でシンプルになるのは「角振動数」
減衰なしばね振動の方程式:
[
m\ddot x + kx = 0
]
指数解を (x=e^{\lambda t}) とすると
[
\lambda^2 + \frac{k}{m}=0
\Rightarrow
\lambda = \pm i\sqrt{\frac{k}{m}}
]
この
[
\underbrace{\sqrt{\frac{k}{m}}}_{\omega_n}
]
が 自然と固有角振動数になる。
Hz に変換すると
[
f = \frac{\omega}{2\pi}
]
と“わざわざ”変換が必要で不便。
✅ 5. 固有値(複素数)の形とも相性が良い
減衰振動では固有値が
[
\lambda = -\frac{c}{2m} \pm i\omega_d
]
になるので、
虚部が直接「角振動数」になっている。
普通の周波数(Hz)では
[
\omega_d = 2\pi f_d
]
と変換しないといけない。
固有値解析では
角振動数のほうが圧倒的に便利で自然。
✅ 6. 工学では「角振動数のほうが本質的」
振動・波動・電気回路・量子力学・機械振動・制御工学…
どの分野でも
- 微分方程式にそのまま出る
- 固有値の虚部と一致する
- 三角関数(または複素指数)の中で自然に出る
という理由で 角振動数 = 本質的な周波数 として使われます。
✅ まとめ
| 量 | 意味 | 理由 |
|---|---|---|
| Hz(f) | 1秒あたりの振動回数 | 直感的だが式が複雑になる |
| 角振動数(ω) | 1秒あたりの位相変化(rad) | 微分方程式、三角関数、固有値で自然に現れる |
✅ 最後に一言
上下運動であっても
三角関数で表す以上、位相(ラジアン)が本質。
だから角振動数を使うのです。
必要なら:
✅ 図で位相と Hz の違い
✅ 固有値の実部・虚部と ω の関係
✅ f と ω を直接比べる感覚的説明
も作れます!
ファンクションジェネレータで200hzのsin波を作った場合、これも角振動数で表す方がわかりやすいですか?
とてもよいポイントです。
結論から言うと:
✅ 結論
用途によって使い分けるが、
“数学的に扱う(微分・位相・伝達関数)なら角振動数のほうが圧倒的にわかりやすい”。
ファンクションジェネレータの“200 Hz”という表示は人間にとって直感的ですが、
回路解析・機械振動・制御理論では必ず角振動数 (\omega = 2\pi f) を使います。
✅ ファンクションジェネレータの出力例(200 Hz)
200 Hz の正弦波なら
[
x(t) = A\sin(2\pi\cdot 200,t)
]
角振動数は
[
\omega = 2\pi f = 2\pi(200) = 400\pi \approx 1256; \mathrm{rad/s}
]
✅ では「角振動数」がわかりやすいのはどんなとき?
以下のような解析をするなら角振動数が圧倒的に便利です。
✅ 1. 微分を取るとき
[
x(t)=\sin(\omega t)
]
[
\frac{dx}{dt} = \omega \cos(\omega t)
]
→ 微分しても構造が変わらない(超きれい)
→ 電気回路・振動解析・制御で必須
Hzのままだと
[
2\pi f
]
が毎回出てきて複雑になります。
✅ 2. 複素指数(オイラーの公式)で扱うとき
[
\sin(\omega t) = \Im{e^{i\omega t}}
]
- 伝達関数
- 周波数応答
- 固有値解析
- フーリエ解析
全部「(i\omega)」という形になります。
Hzでは複素数との整合性が悪い。
✅ 3. Bode線図や回路・機械の共振解析
共振角周波数は
[
\omega_0 = \sqrt{\frac{k}{m}}
]
や
[
\omega_0=\frac{1}{\sqrt{LC}}
]
Hzを使うと毎回
[
f_0 = \frac{1}{2\pi\sqrt{LC}}
]
のように (2\pi) が邪魔をします。
角振動数の方が構造がシンプル。
✅ 4. 位相の扱いが直感的になる
200 Hz の信号の1秒間の位相変化量は
[
\Delta\phi = 2\pi f(1\text{s})= 400\pi \text{ rad}
]
すなわち
角振動数は「1秒に何ラジアン進むか」という位相そのものを表す。
これは電気回路・振動・制御でとても有用。
✅ 一方で、人間の感覚的には Hz がわかりやすい
- 「音が 440 Hz」
- 「モーターが 3600 rpm (60 Hz)」
- 「関数発生器で 200 Hz」
これは Hz の方が直感的で速い。
✅ まとめ:使い分け
| 場面 | Hz | 角振動数(rad/s) |
|---|---|---|
| 人に説明、感覚的理解 | ✅ 使いやすい | △ 少し直感的でない |
| 微分方程式で解析 | △ 毎回 2π が出る | ✅ 圧倒的に便利 |
| 振動・制御・回路解析 | △ 不向き | ✅ 必須レベル |
| 位相(フェーズ)扱い | △ 直感的でない | ✅ 位相と直接対応 |
✅ 結論(改めて)
ファンクションジェネレータで200 Hzのsin波を作った場合、角振動数で表す方がわかりやすいですか?
✅ 解析・計算では角振動数の方が“圧倒的に”わかりやすい。
✅ 設定や直感的理解には Hz の方がわかりやすい。
=目的に応じて使い分けが最適。
必要なら、
✅ 角振動数と固有値の関係
✅ 角振動数とフーリエ変換の関係
✅ 直感的なアニメーション風解説(文章で)
などもできます!







コメント