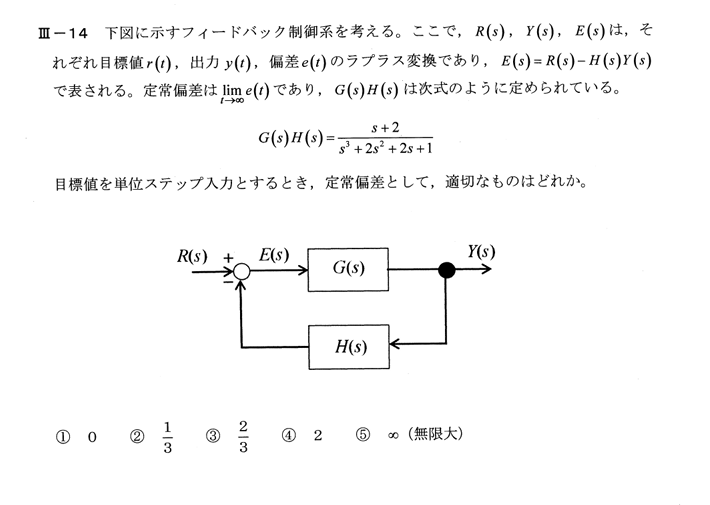
$E(s)=R(s)-H(s)Y(s)=R(s)-H(s)E(s)G(s)$
式を変形して、$R(s)=\frac{1}{s}$を代入すると
$⇔E(s)=\frac{R(s)}{G(s)H(s)+1}=\frac{\frac{1}{s}}{\frac{s+2}{s^3+2s^2+2s+1}+1}$
最終値の定理を用いて、
$\displaystyle \lim_{ t \to \infty }e(t)=\displaystyle \lim_{ s \to 0 }s・E(s)=\displaystyle \lim_{ s \to 0 }s・\frac{\frac{1}{s}}{\frac{s+2}{s^3+2s^2+2s+1}+1}=1/3$
[解答]②
参考
誤差伝達はどのように導出しましたか?
誤差伝達
[
\frac{E(s)}{R(s)}=\frac{1}{1+G(s)H(s)}
]
がどこから出てくるかを、ブロック線図の式づくりから丁寧に導出します。
✅ 1. ブロック線図の関係式を書く
ブロック線図を見ると、
+───→ E(s) ──→ G(s) ──→ Y(s)
↑ │
│ ↓
R(s) <──────── H(s)──
負帰還なので誤差信号は
[
\boxed{E(s)=R(s)-H(s)Y(s)}
]
出力は
[
\boxed{Y(s)=G(s)E(s)}
]
この2式だけで系のふるまいが決まります。
✅ 2. E(s) を R(s) だけの式にしたい
上の2式を連立します。
まず
[
Y(s)=G(s)E(s)
]
を
[
E(s)=R(s)-H(s)Y(s)
]
に代入する。
✅ 3. 代入して整理
[
E(s) = R(s)-H(s),Y(s)
= R(s)-H(s),G(s),E(s)
]
両辺を E(s) についてまとめる:
[
E(s)+H(s)G(s)E(s)=R(s)
]
[
E(s){1+G(s)H(s)}=R(s)
]
✅ 4. 誤差伝達関数の完成
[
\frac{E(s)}{R(s)}=\frac{1}{1+G(s)H(s)}
]
これで、誤差伝達関数が完成します。
✅ 5. まとめ(本質)
負帰還では
- 誤差 (E) が入力となってG(s)へ入る
- 出力 (Y) が H(s) を通って戻ってくる
- 誤差は “入力 − 戻り”
という構造になっているため、必ず
[
E = \frac{R}{1+GH}
]
が生まれます。
✅ 6. 簡易図で理解するとこう
入力 R
↓
[ 1 / (1 + G H ) ] ←── 誤差 E
負帰還を入れると、入力が 1 / (1 + GH) だけ小さくなって誤差となる。
必要なら
✅ 同じ方法で出力伝達関数 (Y/R = G/(1+GH)) の導出
✅ ループゲイン GH の意味
✅ タイプ0/1/2系の定常偏差の一覧
も説明できます!
最終値の定理とはなんですか?
最終値の定理(Final Value Theorem)は、
時間領域での定常値(t→∞ の値)を、ラプラス領域から直接求められる便利な定理です。
結論から書くと…
✅ 最終値の定理(Final Value Theorem)
ラプラス変換された関数 (F(s)) があるとき、時間領域での最終値は
[
\boxed{
\lim_{t\to\infty}f(t)=\lim_{s\to 0} sF(s)
}
]
ただし条件が必要(後述)。
✅ 1. なぜこんな定理が便利なのか?
制御工学では「定常偏差」など、
- (e(t)) が (t\to \infty) でどうなるか?
- 出力 (y(t)) が定常状態では何になるか?
を知りたいことが多い。
しかし、いちいち逆ラプラス変換して (t\to∞) を調べるのは大変。
そこで
[
sE(s)\ \text{の}\ s\to 0
]
だけ見ればよい、という魔法の定理が“最終値の定理”。
✅ 2. 使い方の例(今回の問題)
今回の問題では
[
e_\infty=\lim_{t\to\infty}e(t)
=\lim_{s\to0} sE(s)
]
ステップ入力 (R(s)=1/s) の場合
[
sE(s)=\frac{s}{1+G(s)H(s)}\cdot\frac{1}{s}
=\frac{1}{1+G(s)H(s)}
]
よって
[
e_\infty=\frac{1}{1+G(0)H(0)}
]
というように、逆ラプラス変換なしで答えが出る!
✅ 3. どんなときに使える?(重要)
最終値の定理が成立するための条件:
✅ 系が安定
つまり、
伝達関数の極(閉ループの極)が右半平面にないこと。
特に
- 原点より右側に極があれば、発散するので定常値が存在しない。
- 虚軸上に極がある(例:s = 0 の2重極)と成立しない。
✅ f(t) の最終値が有限に存在すること
(発散する信号に最終値の定理は使えない)
✅ 4. 直感的な意味(理解しやすくする)
ラプラス変換
[
F(s) = \int_0^\infty f(t)e^{-st}dt
]
ここで (s \to 0) にすると
[
e^{-st} \to 1
]
つまり、
「関数全体の積分」に近づく。
さらに
[
sF(s)
]
を考えると、時間が長くなる部分が強調されて
“最終的な値” を取り出す効果になる。
✅ 5. 図で直感をつかむ(文章図解)
f(t)
│ ────→(定常値)
│ /
│ /
│ /
└─────────────→ t
ラプラス領域で s を 0 に寄せていくと、
時間が長い部分の情報が浮き上がり、
定常値が抽出される。
✅ 6. 最終値の定理と対になる「初期値の定理」
[
f(0^+)=\lim_{s\to\infty} sF(s)
]
“初期値”は「高周波成分(s→∞)」を見る。
最終値は「低周波成分(s→0)」を見る。
と対応している。
✅ まとめ
| 名称 | 内容 |
|---|---|
| 最終値の定理 | (\lim_{t\to∞}f(t)=\lim_{s\to0}sF(s)) |
| 有効条件 | 閉ループが安定、虚軸上に極がない |
| 便利な場面 | 定常偏差・定常出力の計算 |
| 直感 | (s→0) は“低周波→長時間”を意味する |
必要なら、
✅ なぜ s→0 が“長時間”を意味するのか
✅ 最終値の定理が使えない反例
✅ 初期値との比較
もさらに詳しく説明できます!
初期値との比較をお願いします
了解!
ここでは 初期値の定理 vs 最終値の定理 を、
意味 → 数式 → 図解 → 直感的イメージ
の順で比較しながら解説します。
✅ 1. まず結論(2つの定理)
● 初期値の定理(Initial Value Theorem)
[
\boxed{f(0^+)=\lim_{s\to\infty}sF(s)}
]
● 最終値の定理(Final Value Theorem)
[
\boxed{\lim_{t\to\infty} f(t)=\lim_{s\to 0} sF(s)}
]
初期値 ⇒ s→∞
最終値 ⇒ s→0
ここが最大のポイント。
✅ 2. なぜ s→∞ で初期値が取れるのか?
ラプラス変換は
[
F(s)=\int_0^\infty f(t)e^{-st}dt
]
s→∞ のとき e^{-st} が超急速減衰 するので、
t=0 付近しか“見えない”。
例:
[
e^{-1000t} \Rightarrow t>0.01s でほぼゼロ
]
したがって
s→∞ にすると「時間の初めの様子」だけ抽出される。
例(一次遅れ)
[
f(t)=1-e^{-t},\quad F(s)=\frac{1}{s}-\frac{1}{s+1}
]
初期値は
[
\lim_{s\to\infty}sF(s)=1-1=0=f(0)
]
✅ 3. なぜ s→0 で最終値が取れるのか?
s→0 では
[
e^{-st}\to1
]
つまり時間方向に対して
長時間の影響が強くなる。
簡単に言うと:
- 初期値は“高周波成分(s大)”に支配される
- 最終値は“低周波成分(s小)”に支配される
だから
[
sF(s)\text{の }s\to0
\Rightarrow\text{定常状態の値を抽出}
]
✅ 4. 直感イメージ(図解)
● 初期値の定理
f(t)
↑│\
│ \
│ \ ← 初期の形だけ重要
│ \
───┴──────── t
0 1
sを大きくすると、t=0付近に
ズームインするような効果がある
● 最終値の定理
f(t)
│ ────→ (定常値)
│ /
│ /
│ /
└────────────── t
sを小さくすると、t→∞ の部分が
強調される(低周波成分)
✅ 5. 正確な使用条件(重要)
| 定理 | 使える条件 |
|---|---|
| 初期値の定理 | f(t) が T=0 で有界。インパルス成分があってもOK |
| 最終値の定理 | 安定系であることが必須(右半平面 or 虚軸上に極がない) |
特に最終値定理は
閉ループが不安定なら絶対に使えない
(振幅が発散し、t→∞ の値が存在しないため)
✅ 6. 数式での対応関係(美しい対称性)
| 項目 | 初期値の定理 | 最終値の定理 |
|---|---|---|
| 対応する極領域 | s→∞ | s→0 |
| 物理意味 | 高周波 → 初期挙動 | 低周波 → 定常挙動 |
| 抽出されるもの | f(0⁺) | f(∞) |
| どこで使う? | 初期条件付きの問題 | 定常偏差の計算 |
✅ 7. 最後に超短まとめ
- s→∞(高周波)を見ると → 初期値がわかる
- s→0(低周波)を見ると → 最終値(定常値)がわかる
- 最終値は安定系でしか使えない
- 初期値はほぼすべての系で使える
必要なら、
✅ 初期値定理の証明
✅ 最終値定理の証明
✅ 両者が破綻する例(RHP極の例)
などもできます!
ラプラス変換のメリットはなんですか?
ラプラス変換の“すごさ”は、
時間領域の面倒くさい微分方程式を、代数(足し算・掛け算)に変えてしまう
という点にあります。
数学を魔法に変えてしまう感じです。
ここでは、直観的メリット → 工学的メリット → 数学的メリット
の順に整理します。
✅ 1. まず直感から:
微分方程式が“ふつうの方程式”に変わる!
例えば
[
m\ddot{x}+c\dot{x}+kx = f(t)
]
これは時間領域では
- 微分がある
- 時間変化がある
- 解析が面倒
でもラプラス変換すると
[
(m s^2 + c s + k)X(s) = F(s)
]
ただの代数式。
微分は
[
\frac{d}{dt} \rightarrow s
]
になる。
✅ だから 解くのが圧倒的に簡単になる。
✅ 2. 工学的メリット(制御・機械・電気で重要)
✅ (1) 微分方程式が代数方程式になる
→ ブロック線図、伝達関数、フィードバック解析が可能。
✅ (2) 初期条件を自動で含められる
[
L{\dot{x}} = sX(s)-x(0)
]
→ 初期値を勝手に入れてくれる。
✅ (3) 伝達関数 G(s) が扱える
振動・制御・電気回路のふるまいを
たった G(s) という関数ひとつで扱える。
✅ (4) 安定性が極(s平面)で一瞬で判断できる
- 右半平面に極がある → 不安定
- 左半平面 → 安定
直感でわかる!
✅ (5) 最終値の定理・初期値の定理が使える
→ 逆変換なしで結果が出る。
✅ (6) 畳み込み積分が単なる掛け算に
[
y(t)=f(t)*g(t)
\quad\Rightarrow\quad
Y(s)=F(s)G(s)
]
→ 応答計算が爆速で終わる。
✅ 3. もっと深いメリット(周波数領域で考える)
✅ (1) s = σ + iω (複素数)なので
減衰+振動を 1本の複素平面で同時に扱える
例:
- 振動成分 → (iω) 軸
- 減衰成分 → σ 軸
✅ (2) 周波数応答・Bode線図・共振周波数が自然に出てくる
[
G(i\omega)
]
を見れば
- 増幅度
- 位相遅れ
- 共振現象
が全て分かる。
✅ 4. 例で見るとわかりやすい
例:ステップ応答を求めたい
時間領域なら
微分方程式を解く
→ 定数項合わせる
→ 初期条件入れる
→ 計算がしんどい
ラプラスなら
[
R(s)=\frac{1}{s}
]
[
Y(s)=G(s)R(s)
]
[
y(t)=\mathcal{L}^{-1}{Y(s)}
]
伝達関数の掛け算だけで終わり。
✅ 5. ざっくりまとめ(本質だけ)
| メリット | 理由 |
|---|---|
| 微分が s に置き換わる | 微分方程式が代数方程式になる |
| 初期条件が自動で入る | (sX(s)-x(0)) の項 |
| 畳み込みが掛け算に | 応答解析が簡単 |
| 周波数特性がわかる | (G(i\omega)) がそのまま周波数応答 |
| 安定性がわかる | s 平面の極の位置 |
| 制御工学に必須 | 伝達関数で一瞬でモデル化 |
✅ 超直感イメージ
ラプラス変換は
「時間の世界」→「周波数+減衰の世界」への変換。
時間の複雑な絡み合いを、
一本の複素数 s 軸に全部押し込む“魔法の圧縮”みたいなもの。
必要なら、
✅ ラプラス変換とフーリエ変換の違い
✅ ラプラス変換の厳密な定義と収束領域
✅ なぜ微分が s になるのかの証明
なども解説できます!
目標値は入力値を入れるのに目標値というのはなぜですか?
ここは 制御工学の言葉のクセが原因で、最初は必ず混乱します。
実は “入力値” と “目標値(指令値)” は、同じ場合と違う場合があるんです。
順を追って、非常に明快に説明します。
✅ 結論(これが最も大事)
目標値(reference)とは、“システムにやらせたい動き・状態”。
それを数値として入力するので、
結果として R(s) が「入力」であり「目標値」になる。
つまり
[
\text{入力}=\text{目標値}
]
ではなく、
[
\text{入力}の中でも特に「目標とする値」をR(s)と呼ぶ。
]
✅ 1. 普通の物理では “入力=外から加えたもの”
例えば質点に力を加えるなら
- 力 → 入力
- 変位 → 出力
これは直感的。
✅ 2. しかし制御では「やらせたい動作」が最優先
制御の目的は
装置を思い通りの動きにさせること。
だから、
人間(または上位システム)が設定する「望む値」を
目標値(set point / reference) と呼びます。
例えば:
- ロボットのアーム角度を 30° にしたい
→ 30° が目標値 - モーターを毎分 1500 rpm にしたい
→ 1500 rpm が目標値 - 温度を 70℃ にしたい
→ 70℃ が目標値
そしてシステムへ「30°」を数値として入力する。この入力信号を
[
R(s)
]
と書く。
✅ 3. “入力=目標値” と言われる理由
入力という言葉は広すぎる
だから制御ではもっと意味の特定された言葉が必要。
| 用語 | 意味 |
|---|---|
| 入力(input) | システムに与えるすべての信号 |
| 目標値(reference) | 望む動作・状態の値 |
| 外乱(disturbance) | 望まない入力(風、摩擦、衝撃など) |
つまり「入力の中の一部」である
“目標として与える信号” だけを特別に R と呼ぶ。
そのため、
R(s) は「入力信号」なのに “目標値” と呼ばれる。
✅ 4. ブロック線図でみると一目瞭然
目標値 R(s) → (+) → E(s) → G(s) → Y(s)
↑
└── H(s) ────
ここで
- R(s):やりたいこと(目標)
- Y(s):実際の出力
- H(s):フィードバック
- E(s): 誤差 = R − H·Y
✅ 目標値は “入力” ではなく “基準値”
“これに近づけるために制御する値” だから。
✅ 5. なぜ「入力値」と言わず「目標値」と言うのか
理由は 3 つあります:
✅① 入力には「外乱」も含まれる
目標値ではない。
✅② 制御対象に強制力を加える「操作量(入力)」とも区別したい
たとえばモーターなら
- 目標値 → 回転数の希望値
- 入力 → モータへの電圧(制御系が決める)
これはまったく別物。
✅③ 目標値は人間がシステムに与える“指令”だから
操作入力とは役割が違う。
✅ 6. 名称の対応を整理しておくと理解が速い
| 名前 | 主な役割 |
|---|---|
| 目標値 R(s) | やらせたい状態・位置・速度 |
| 誤差信号 E(s) | R − H·Y (制御の原動力) |
| 操作量 U(s) | アクチュエータへ送る信号(制御器の出力) |
| 出力 Y(s) | 実際の応答 |
| 外乱 D(s) | 望まない入力 |
✅ まとめ
目標値とは、
「制御で実現したい値(指令値)を “入力信号として” 入れるもの」。
だから
- 入力信号ではある
- しかし単なる入力ではなく「目標」なので R(s) と特別に呼ぶ
というだけです。
必要なら:
✅ ブロック線図での R(s), U(s), Y(s), D(s) の役割
✅ 制御系の「入力」「目標」「外乱」「操作量」の違い
✅ PID 制御における目標値の具体例
なども詳しく説明できます!






コメント