【問題】(pdfファイル)
ダウンロードして使用してください。
問題と解答
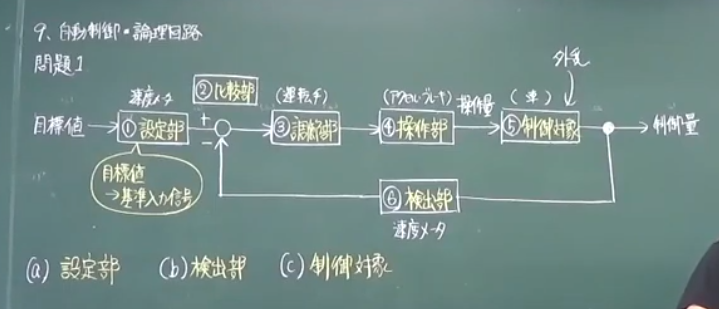
問題1
フィードバック制御系の各部のはたらきとして,空欄に適する語句を語群から選んで答えよ。また,説明に最も関連するものを語群から選んで答えよ。
【語群】調節部 設定部 比較部 検出部 制御対象 操作部
- 基準入力信号を発する
- 制御量を検出し,基準入力信号と同種類の物理量に変換する
- 外乱の作用を受ける
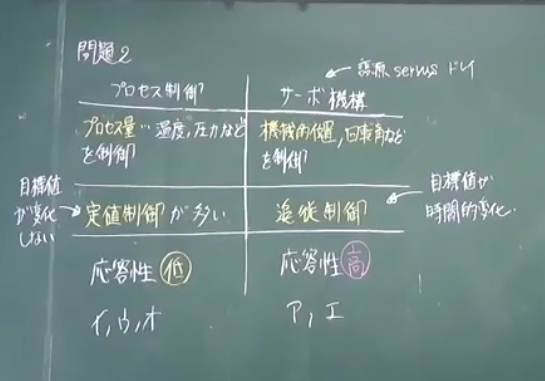
問題2
以下の項目ア~オは,プロセス制御,サーボ機構のどちらについて述べているか。どちらかに分類せよ。
ア.制御量が機械的位置,回転角などを主体とする制御である。
イ.制御量が温度,流量,圧力などを主体とする制御である。
ウ.定値制御が多い。
エ.目標値が時間とともに任意に変化する。
オ.応答性がかなり低い。
問題3
(1)目標値R(s)と制御量C(s)の間の伝達関数C(s)/R(s)を求めよ。
(2)外乱D(s)と制御量C(s)の間の伝達関数C(s)/D(s)を求めよ。

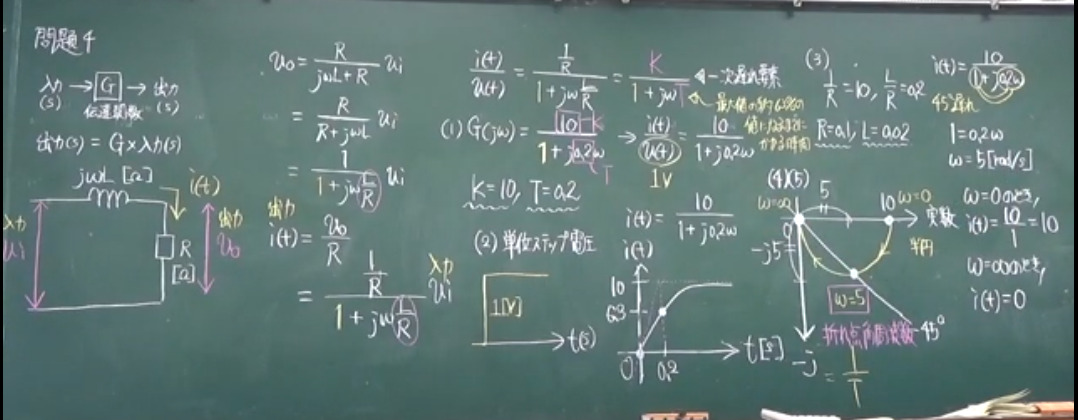
問題4
R-L回路において,図のように単位ステップ電圧v(t)[V]を加えたときの抵抗Rに流れる電流をi(t)[A]とする
と,出力をi(t)としたときの周波数伝達関数の式はG(jω) = 10/(1+j0.2ω) の形で表されている。
(1)時定数Tおよびゲイン定数Kを求めよ。
(2)時刻t[s]と電流i(t)[A]のグラフをかけ。
(3)R[Ω]およびL[H]の値を求めよ。
(4)位相が45°遅れるときの角速度[rad/s]を求めよ。
(5)G(jω)のベクトル軌跡を表せ。
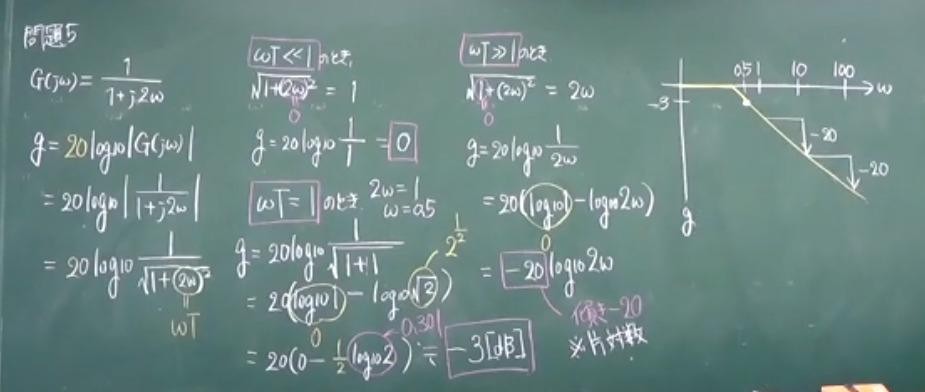
問題5
G(jω) =1/ 1+j2ω のボード線図をかけ。
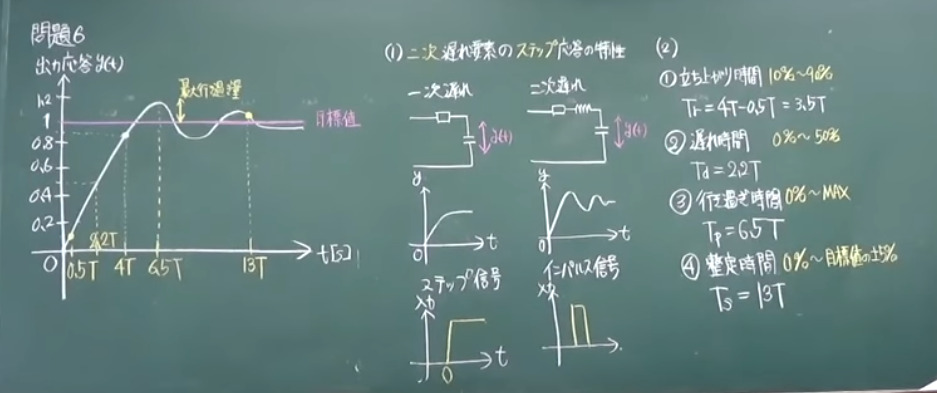
問題6
(1)上記のグラフは,どのような特性を表しているか。以下の語群より必要な語句を2つ用いて説明せよ。
語群{ 一次 , 二次 , インパルス , ステップ }
(2)グラフより,立ち上がり時間Tr,遅れ時間Td,行き過ぎ時間Tp,整定時間Tsをそれぞれ答えよ。
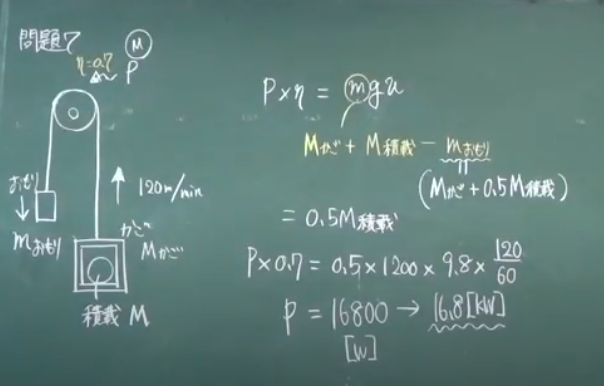
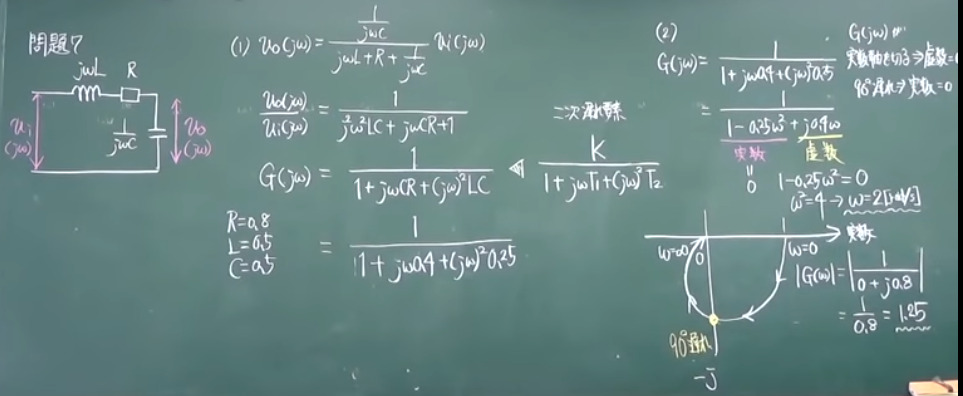
問題7
次図のRLC直列回路への入力をvi(jω),出力をvo(jω)としたときの周波数伝達係数をG(jω)とする。
(1)R = 0.8[Ω],L = 0.5[H],C = 0.5[F]のとき,周波数伝達係数G(jω)を求めよ。
(2)位相が90°遅れるときのゲイン|G(jω)|を求めよ。
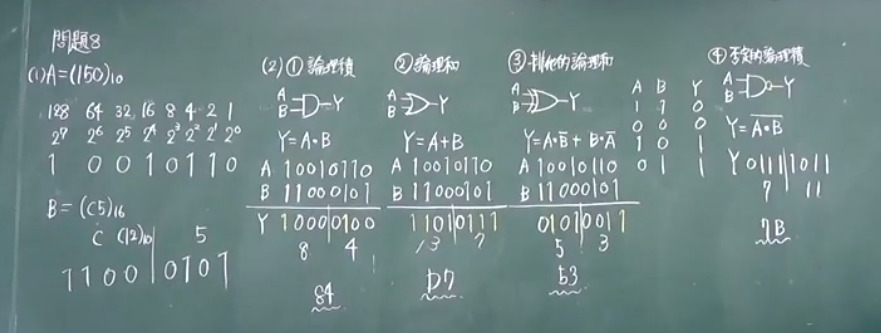
問題8
2進数A,Bがあり,Aは10進数で(150)10と表され,Bは16進数表記で(C5)16と表される。
(1)A,Bを2進数表記で表せ。
(2)A,Bをビットごとに以下の論理演算を行い,16進数で表せ。
- 論理積(AND)
- 論理和(OR)
- 排他的論理和(EX-OR)
- 否定的論理積(NAND)
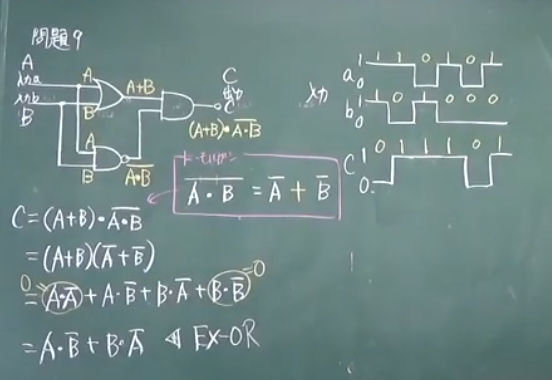
問題9
左図の論理回路において,入力a及び入力bに右図に示すような入力があるときの出力cのタイムチャートをかけ。
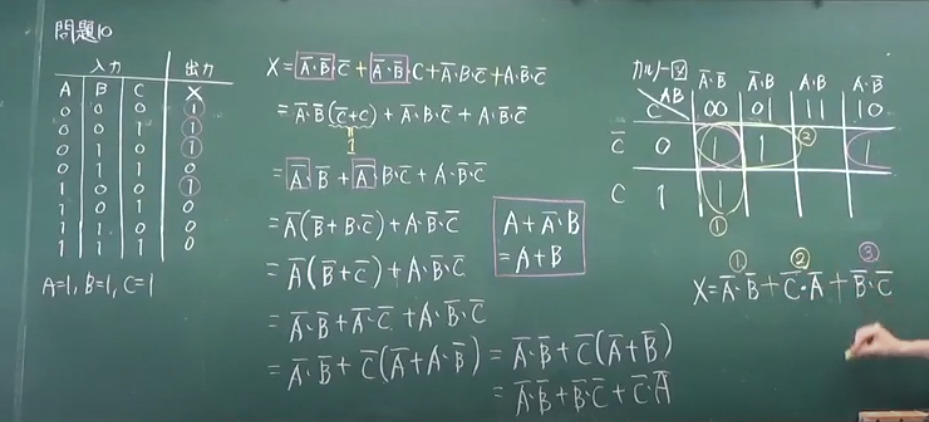
問題10
入力信号A,BおよびC,出力信号がXの論理回路が,次のような真理値表を満たしているとき,Xの論理式を簡略化して答えよ。
| 入力信号 | 出力信号 | ||
| A | B | C | X |
| 0 | 0 | 0 | 1 |
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 1 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 1 |
| 1 | 0 | 1 | 0 |
| 1 | 1 | 0 | 0 |
| 1 | 1 | 1 | 0 |
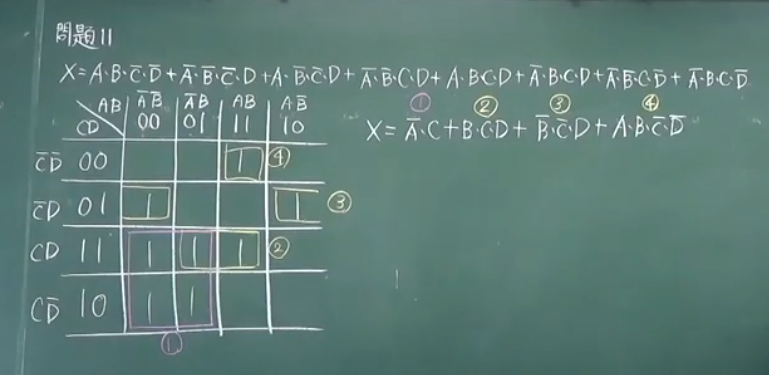
問題11
以下の論理式を簡単にせよ。
X = A・B・C・D + A・B・C・D + A・B・C・D + A・B・C・D + A・B・C・D + A・B・C・D + A・B・C・D + A・B・C・D
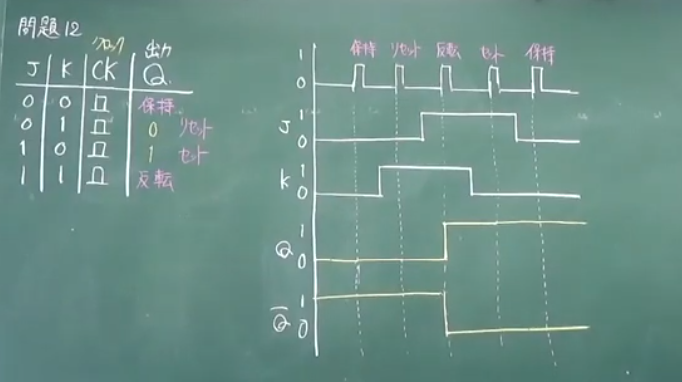
問題12
JKフリップフロップ回路において、図のような入力に対して、出力のQおよびQのタイムチャートはどのように表されるか。
<おすすめ記事>






コメント